文章图片

文章图片
文章图片
文章图片
文章图片
真的能剪“翅膀”?
从工具的角度来说 , 似乎可以 。 虽然现在的机械臂并未配备剪刀 , 但它的末端执行机构是模块化设计的 , 以现在的技术 , 如果非要换上剪刀、锤子甚至电钻模块 , 也不是不行 。 但真要“剪翅膀” , 可能会面临一个问题 , 那就是太空机械臂的运行速度太慢了 。
这个末端执行器是模块化设计的
你非要换成这样的模块 , 也不是不行
对 , 太空机械臂可不像汽车生产线上的机械手那样每天以快节奏忙忙碌碌 , 它更像乌龟 , 或者说像《疯狂动物城》里的树獭“闪电” , 一举一动都是慢动作 , 最大线速度与最大角速度一般每秒在厘米级 , 甚至在毫米级 。 这么慢的速度去“剪翅膀” , 可能追不上 。
这个速度其实是加快了NNN倍的
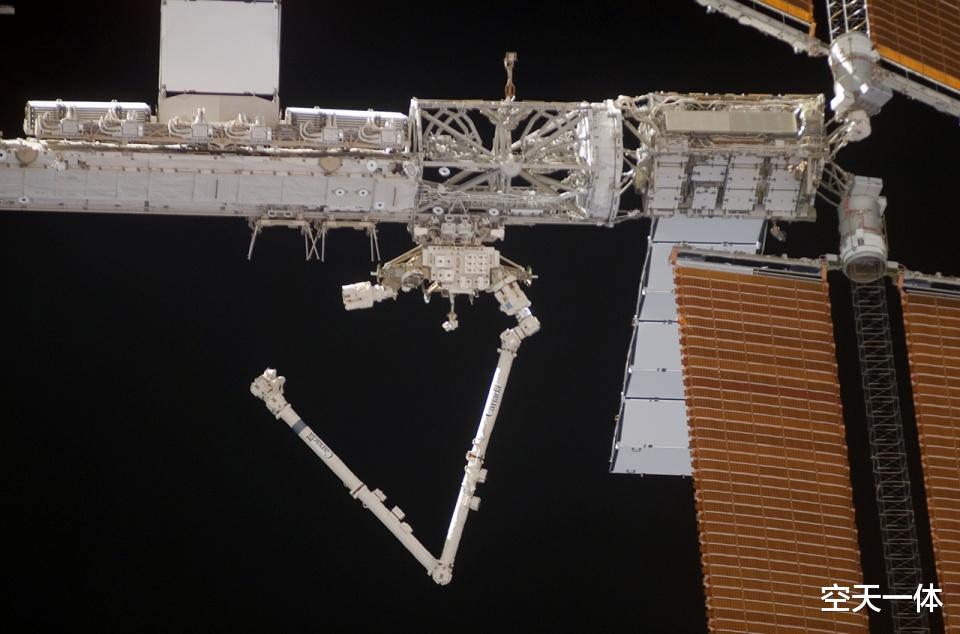
比如国际空间站上的加拿大臂2 , 它在桁架上最高的移动速度是2.5厘米/秒 , 角速度更慢 , 横向去“捕捉”飞船的时候 , 基本上可以用“滚芥投针”来形容 , 要剪其他航天器的“翅膀”也一样 , 况且对方还是个非合作目标 , 容不得机械臂“慢条斯理”地去操作 。
【物理学家|太空机械臂真能剪翅膀吗?移动速度慢得像乌龟,最快每秒2.5厘米】
它的移动速度最快也是2.5厘米/秒
机械臂捕捉飞船
看到这里 , 可能有人说了 , 难道不能让机械臂跑快一点吗?不行我上去操控 , 我开钩机很有经验的 。 但实际上 , 机械臂的移动速度 , 首先要受到电能的限制 , 在空间站靠太阳能电池板转换的那点电能 , 驱动电脑问题不大 , 但想驱动大型机械设备 , 还是捉襟见肘的 。
电能不允许它跑得太快
其次 , 机械臂执行空间任务时 , 基座处于自由漂浮状态 , 基座载体与机械臂之间存在动力学耦合 , 动作幅度越大 , 动力学耦合现象也越明显 。 机械臂的运动会改变载体的位置和姿态 , 而载体位置姿态的改变 , 也会反过来影响空间机械臂末端的定位 , 同时也会放大空间机械臂末端操作器的定位误差 , 不利于空间机械臂的高精度控制 。 因此 , 它不像开钩机 , 而像起重船开啤酒瓶盖 。
这是一个动对动得复杂问题
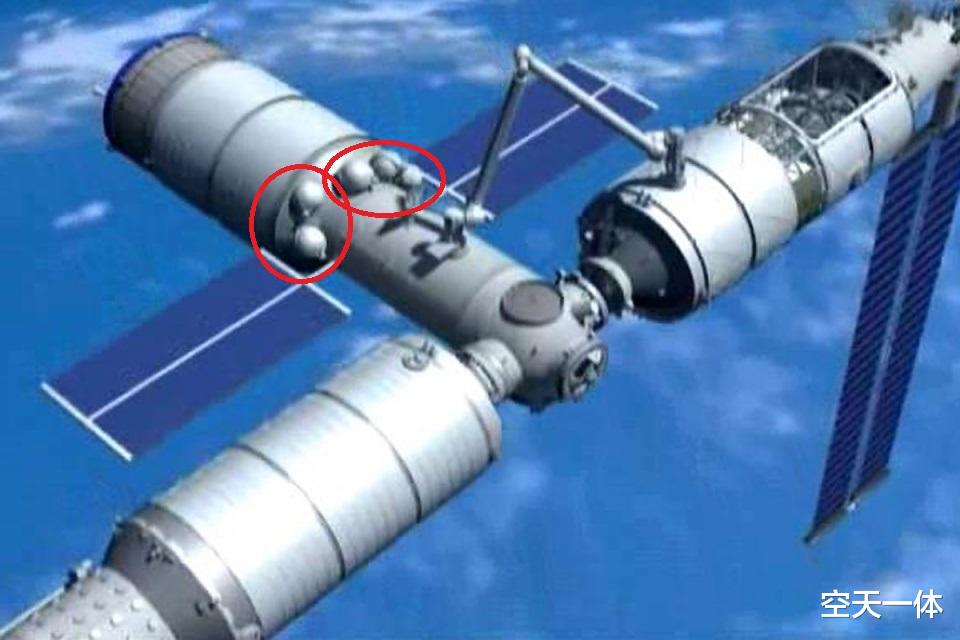
当然 , 采用一定的补偿机制 , 还是可以让机械臂在大幅度动作下将精度稳定在一定范围之内的 。 比如根据当前位姿与目标的位姿 , 计算空间中和机械臂期望的末端线速度和角速度 , 然后利用空间站基座的陀螺获得基座角速度 , 所谓的陀螺 , 在我们的空间站上就是那四个“大馒头” 。 再计算空间站基座的线速度和雅克比矩阵、计算空间机械臂雅克比矩阵 , 利用基座速度对空间站期望的末端速度在工具坐标下进行补偿 , 计算机械臂期望运动的关节速度 。
这些大馒头里就是陀螺仪 , 与机械臂得运动息息相关
其实 , 机械臂在空间站上的功能已经够多了 , 比如舱体表面爬行转移、舱外状态监视与舱表状态检查、辅助航天员出舱活动、转位实验舱 , 开展空间站在轨建造任务、捕获悬停航天器 , 辅助对接、转移货运飞船载荷、辅助航天员转移核心舱太阳翼等等 , 已经够忙了 , “剪翅膀”只是大家的一种风趣幽默和美好想象 , 不必当真 。
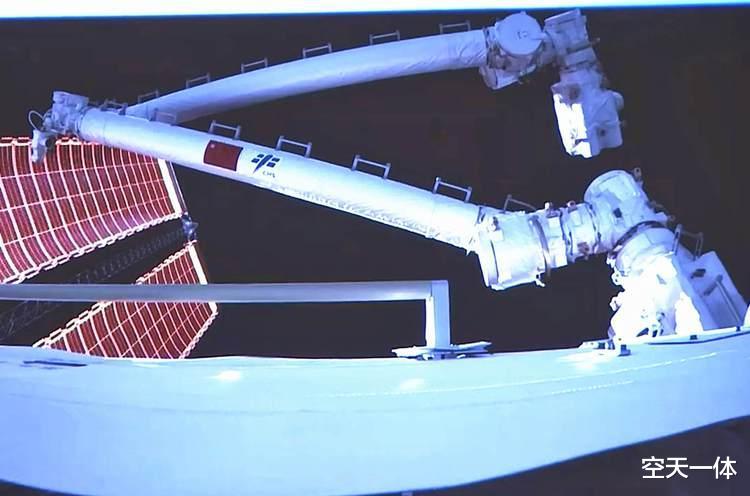
我国机械臂辅助航天员出舱
我国机械臂辅助航天员出舱
推荐阅读







- 揭秘陶乐德事件:男子在拘留室离奇消失,难道平行时空真的存在?
- 青藏高原将停止增高,后果不可承受,我们却未感到危机
- 寻求气候变化的确定性:要多少才足够?
- 少见!今年十五的月亮,不是十六圆
- 科学家在大型强子对撞机上寻找难以捉摸的基本粒子
- 地球果真出了大问题?火山爆发后出现神秘现象,科学家紧急发声
- 简述相对论发展史:从伽利略到引力波
- 重磅!英美科学家对奥密克戎病毒11个最新判断!对全球意义重大!
- 15000年前海底金字塔被发现,科学家推测:中华文明前身是MU文明
- 人的气运竟然真的存在?科学家竟然已经证实!