文章图片

文章图片

文章图片

文章图片
文章图片

文章图片

文章图片
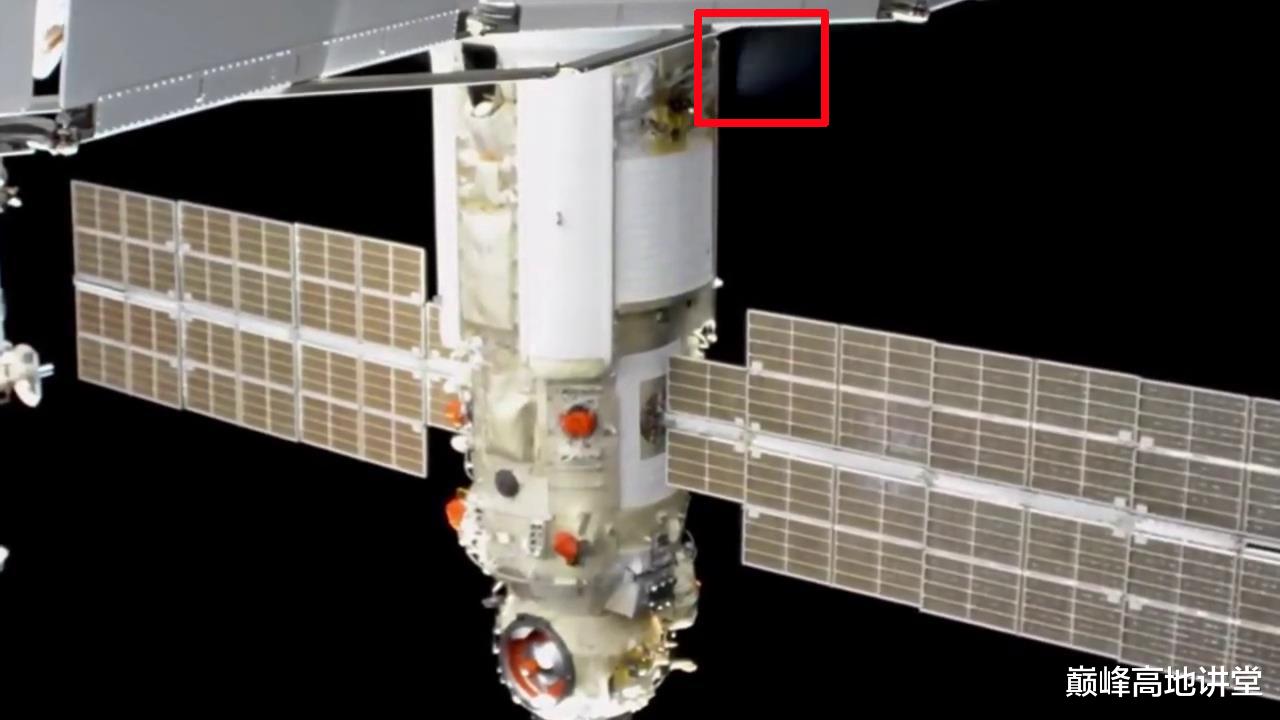
俄罗斯科学号实验舱在与国际空间站对接形成刚性组合体后 , 人们都以为万事大吉了 , 没想到在随后的几个小时里该舱段由于软件故障导致姿控动力突然失控 , 结果就是搞“歪”了国际空间站(姿态偏转约45°) , 以至于星辰号服务舱与进步号货运飞船接力启动姿控发动机对冲科学号 , 才最终稳住了姿态 。
【国际空间站|俄科学号撞歪国际空间站,天宫也有同类难题,机械臂决定成败】科学号姿控发动机喷射形成的羽流
由此也牵出了另一个事态:科学号不仅是国际空间站十三年来对接的最大规模舱段 , 同时也是该站第一次在径向(沿直径或半径的直线方向 , 或垂直于轴的直线方向 。 )对接任务中接纳20吨级舱段 。
科学号对接国际空间站位置示意图
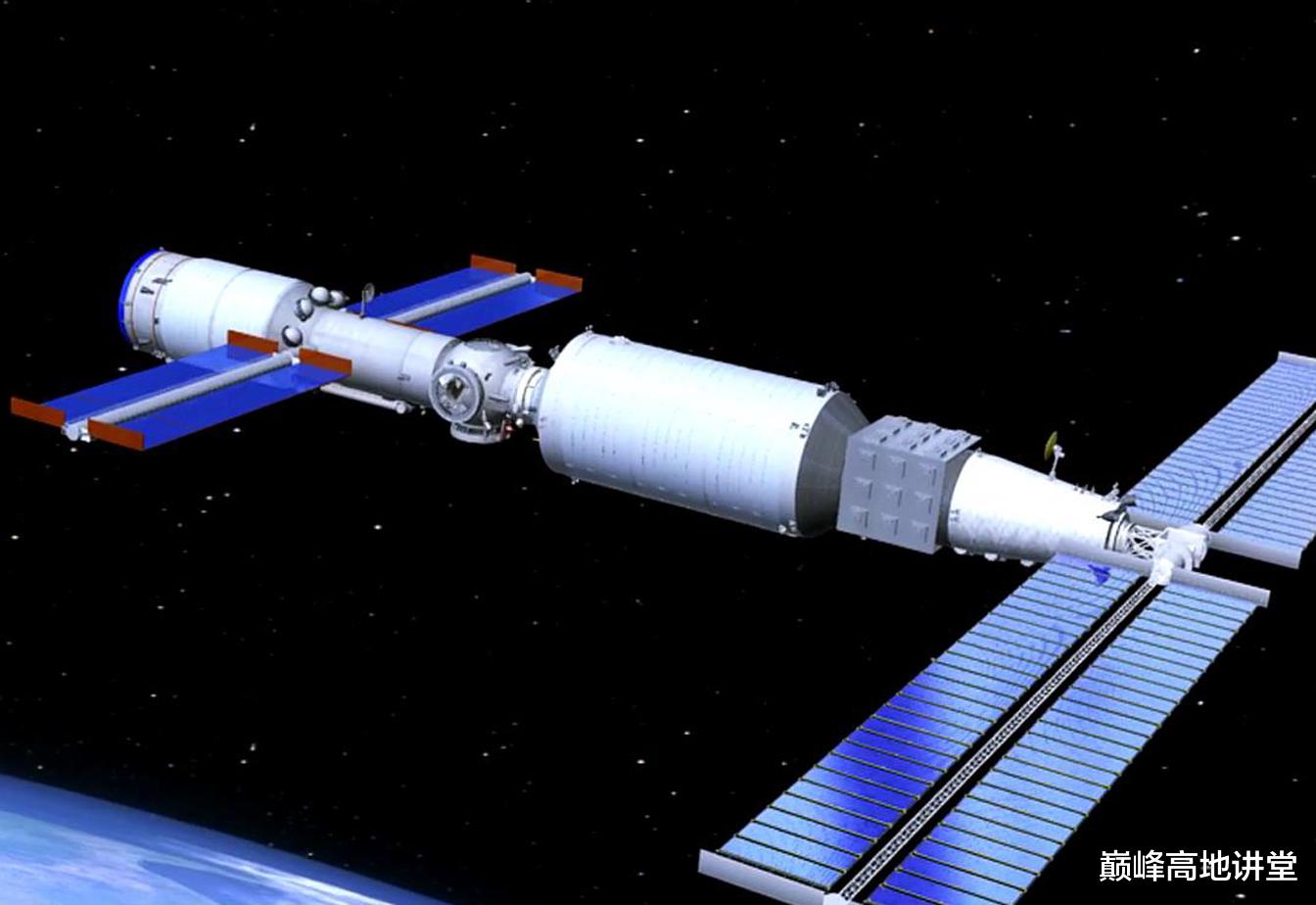
天宫空间站也面临径向对接两个20吨级舱段的任务需求 , 即问天号实验舱与梦天号实验舱分别对接天和一号核心舱节点舱的第四象限与第二象限径向对接口(也称为“侧向停泊口”) 。
问天号与梦天号皆有径向对接需求
由于径向对接口与空间站质心不在一条连线上 , 如果直接对接 , 较大的撞击能量会形成更大的偏转力矩 , 因此空间站对接大型舱段通常选择轴向对接口对接 。
比如 , 国际空间站除飞船与小型舱段外全部选择轴向对接 , 个别侧向对接的大型舱段也都是由机械臂转位辅助对接 。
国际空间站轴向对接的早期部分舱段
空间站径向对接通常有两种方式:
1.转位机械臂 。 历史上和平号空间站的几个实验舱都是通过此种方案对接 , 这是一种功能单一 , 但结构简单可靠的机械臂 。 由安装在追踪飞行器上的“旋转臂”与安装在目标飞行器上的“基座”两大部分组成 。
和平号空间站
追踪飞行器先与目标飞行器进行自主轴向对接 , 而后两器分离旋转臂与基座对接 , 旋转臂通过上翻、摆动、下翻三个环节操作后 , 将追踪飞行器移动至目标飞行器的径向位置 , 而后两器实现径向对接 。
转位机械臂
2.多自由度空间机械臂 。 前面提到国际空间站除飞船与小型舱段外全部采用轴向对接 , 但也有侧向对接需求的大型舱段 , 这些舱段皆由航天飞机运输 , 在航天飞机与国际空间站轴向对接后 , 再由多自由度空间机械臂辅助转位对接于径向对接口 。
由多自由度机械臂辅助对接的国际空间站径向大型舱段
科学号之所以可以直接与国际空间站径向对接有两个条件 , 首先是杆锥式对接装置撞击能量远小于异体同构周边对接装置 , 再就是国际空间站400吨级的体量已经足够大 , 站上配置的控制力矩陀螺可以克服科学号的撞击能量 。
科学号杆锥式对接装置
载人航天领域轴向对接已经比较成熟 , 可以对接近百吨级体量的航天飞机轨道器 。 径向对接虽然也有相对成熟的技术手段可供选择 , 但对接舱段的规模仍然有较大的限制 , 同时存在诸多工程风险 , 科学号的最新实践已经显现出了这种风险 。
有鉴于此 , 天宫空间站为了径向对接任务万无一失 , 选择的是双备份手段 , 既有和平号空间站的转位机械臂 , 也有国际空间站使用的多自由度机械臂辅助对接 。
天宫采用先轴向后径向对接方案
天宫空间站的问天号实验舱与梦天号实验舱径向对接的第一方案是结构简单可靠的“转位机械臂” , 具体对接流程如下图所示:
转位机械臂对接转位过程
第二方案就是依托天和核心舱搭载的大型七自由度空间机械臂 , 该机械臂已经在神舟十二号乘组首次出舱任务中小试牛刀 , 在转位大型实验舱任务中 , 天和机械臂将停泊在核心舱小柱段第三象限 。
推荐阅读







- 关于鹦鹉螺的知识,造型可爱的‘活化石’
- 这野兽真可怜!常被黄鼬咬断脖子,豹叼它喂幼崽,猞猁靠它过日子
- 刚刚启动!第一棒是他
- 中国空间站太阳能转化效率30%!美国不服:我换电池
- 私人公司也能训练宇航员,美国首个私人宇航员任务将于3月底发射
- 在国际空间站中,人类可能受到的伤害
- 事关月球采矿控制权,美国拒绝与中国合作,没想到中方已抢先一步
- 国际空间站附近现神秘黄色物体,绝非人类杰作,外星人的粪便?
- NASA终于宣布国际空间站将坠毁,时间:2031年1月,地点:尼莫点
- 史上唯一被陨石砸中的人,虽只受了皮外伤,但后续的麻烦却没停过