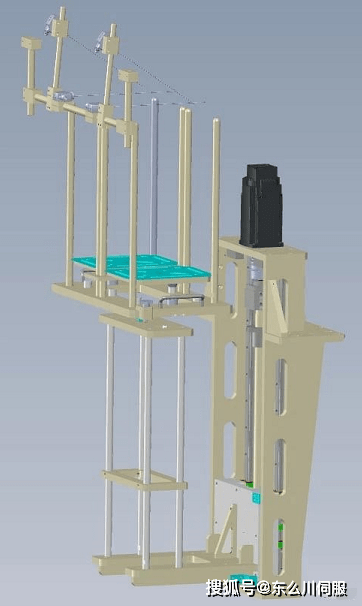
非标自动化项目中会用到各种各样的供料机 , 其中堆栈式供料机是比较常用的一种 , 通常都是用伺服电机顶升供料 。
硬件配置通常为:垂直轴伺服电机要带抱闸(断电抱闸上电释放 , 这个前面有文说过 , 不知道的去翻翻看) , 直线位置上有两个极限传感器和一个原点传感器 。 顶升托盘上有一个传感器来检测托盘是否有料 , 可以是光电传感器也可以是接近传感器 , 根据产品的材质来定 , 推荐使用接近传感器 , 金属材质使用电感式 , 非金属材质使用电容式 。 顶部供料位有检测供料到位传感器 , 这个传感器考虑成本通常使用光电传感器 。
文章图片
www.sheyy.com
设计时要把原位传感器放置在靠近下位极限传感器的地方 , 这样上电后原点回归的时候顶升托盘一定是往下运行 , 因为不知道料仓内有多少产品 , 往上运行容易溢出产品 。
顶部供料位使用光电传感器不容易精准检测到产品 , 尤其产品是很薄的时候 , 可以考虑对射光纤传感器(最好使用槽型光纤传感器)或者激光传感器 , 即使这样也不容易调节到比较精准的位置 。 其实主要是控制上问题 , 只要改一下控制流程就可以比较精准的检测 , 这个精准是相对的 , 不是绝对的 , 通常情况下能够满足使用要求 。
在控制中最错误的做法就是把伺服电机当普通电机使用 , 上下运行使用连续运动 , 停止完全靠传感器的位置检测 , 这样就完全失去了使用伺服电机的意义 。 伺服控制时需要提前设定两个位置 , 一个就是最低位 , 也就是放料位 , 一个就是最高位 , 这个最高位比较讲究 , 就是在顶升托盘只有一个产品存在 , 并且顶部传感器能够检测到 , 一旦取走该产品 , 顶部传感器可能就无法检测到 。 有了这两个位置设定之后 , 每次上升时就直接使用绝对位置运动 , 位置设定就是最高位 , 这个时候的运动速度是快速运动 , 一旦在运动中顶部传感器检测到产品伺服电机就立即停止 , 然后伺服电机低速往下运动 , 当顶部传感器检测不到产品后停止 , 接着伺服电机再低速往上运动 , 当顶部传感器检测到产品停止 , 这样就完成了一次供料定位 。 当在供料位产品被取走之后就重复刚才低速运动的部分 , 就可以完成多次供料定位 。
【时候|伺服电机顶升堆栈式供料机方案】供料控制中使用两种速度来接近顶部传感器是这个应用的精妙之处 , 既能精确控制位置 , 还不浪费供料时间 。 时间匆忙没有时间把完整的控制流程图做出来了 , 以后有时间再提供给大家 , 感兴趣的朋友也可以自己去写流程图 , 欢迎发给我一起交流 。
推荐阅读







- 战略|科力尔电机荣获第一届“新湖南贡献奖先进集体”!
- 核电机组|【难忘2021·科技创新】在科技现代化新征程上阔步前行
- 核电机组|在科技现代化新征程上阔步前行
- 技术|降价!折叠屏手机有点火,是时候入手了?业内人士建议“再等等”→
- 研制成功|卧龙首台永磁直驱风力发电机研制成功
- 电机|1799元,小米米家波轮洗衣机尊享版10kg:纳米银离子除菌率96%
- IT|我国配备自主研制主驱动电机的超大直径盾构机下线
- 电机|购买开门电机需要注意哪些
- 能源系统|全球首台钠离子太阳能发电机亮相
- 硬件|英国Hornsea 2海上风电场已启用首批发电机组 总装量世界第一