一种增强群体机器人如何搜索多个目标的方案
很多文章的报道都是由微观而宏观 , 今日小编讲给大家带来的关于一种增强群体机器人如何搜索多个目标的方案的资讯也不例外,希翼可以在一定的程度上开阔你们的视野!y有对一种增强群体机器人如何搜索多个目标的方案这篇文章感兴趣的小伙伴可以一起来看看
在过去的十年左右的时间里,研究人员向来在尝试开辟可在机器人团队之间实现有效协作策略的技术 。与单个机器人相比,机器人团队可以更好地完成的任务之一是在其周围环境中同时搜索多个目标或物体 。
文章插图
机器人团队一次集体追寻和识别众多目标的能力可能对广泛的应用很实用 。例如 , 它可以帮助监视应用程序并帮助更好地跟踪个人或车辆 。
同济大学和斯图加特大学的研究人员最近设计了一个系统框架,以使群体机器人能够更有效地进行多目标搜索 。该框架在IEEE Access上发表的一篇论文中提出,它基于机械粒子群优化方法和人工势场的使用 。

文章插图
研究人员在论文中写道:“创新的扩展使生物启示式粒子群优化技术首先具有机器人的机械性能,从而降低了操纵费用,并且已经超出了该算法的常规应用范围 。”
在他们的论文中,研究人员首先总结了先前开辟的用于多目标搜索的技术的关键特征 , 强调了这些技术在评估中的表现如何 。随后,他们提出了基于机械粒子群优化和人工势场的自己的方案 。
研究人员的方案考虑了可以从多个目标搜索中受益的现实世界中的群体机器人应用程序 。为了实现更有效的搜索,它会将整个机器人群组织为子组,这些子组根据这些目标之间的差异(例如,信号频率)搜索目标 。
当一个小组朝一个目标而不是分配给它的目标移动时,它会受到惩处 。研究人员提出的框架除了指导群体的集体行为以更有效地搜索多个目标外,还可以帮助机器人幸免周围环境的障碍或妨碍其前进的道路 。

文章插图
研究人员在论文中解释说:“向无目标的机器人群施加惩处,因此为每个机器人群建立了单峰目标函数 。”“与此同时 , 所开辟的方法还具有根据模块切换策略根据其优先级工作的避障能力 。”
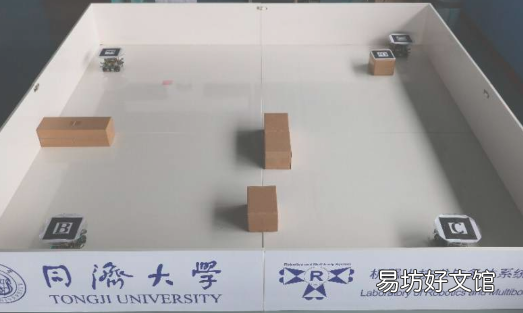
同济大学和斯图加特大学的研究人员在仿真和涉及他们开辟的真正移动机器人的实验中对他们的方案进行了评估 。他们发现,即使惟独少数几个机器人在进行搜索,他们的框架也同意 机器人群体集体搜索并找到多个目标 。
将来,最近这篇论文中介绍的新方案可以使机器人团队以高效且有组织的方式一次搜索多个目标 。这可以为广泛的应用打开新的有趣的可能性,例如,增强监视方法或使机器人团队能够用作在各种环境中搜索特定项目的手段 。
【一种增强群体机器人如何搜索多个目标的方案】在接下来的研究中,研究人员计划进一步评估他们的方法的有效性及其在特定的实际应用中的价值 。此外,他们希翼进一步开辟其方案,以提高机器人所实现的整体定位精度 。
推荐阅读







- 通过将图像隐藏在AI中创新可增强数字隐私
- 整体桥悬挂和五连杆式非独立悬挂是不是一种悬挂?区别在哪?
- 第一代骁龙7增强版算什么档次
- 天窗冰甲是什么?
- 乌岽是什么意思 乌岽是啥意思
- 积炭清洗剂有用吗?
- 鼻涕虫有毒吗 鼻涕虫
- 菠菜的营养价值 激活大脑功能增强青春活力
- 雷森风扇怎样
- 调查称53.7%年轻人存款不足10万 每月3千是中等收入群体