机器之心报道
编辑:小舟
自然界永远是人类科技进步的灵感源泉 。如今的机器人 , 可谓是千姿百态、形态各异 , 比如长成这样的:
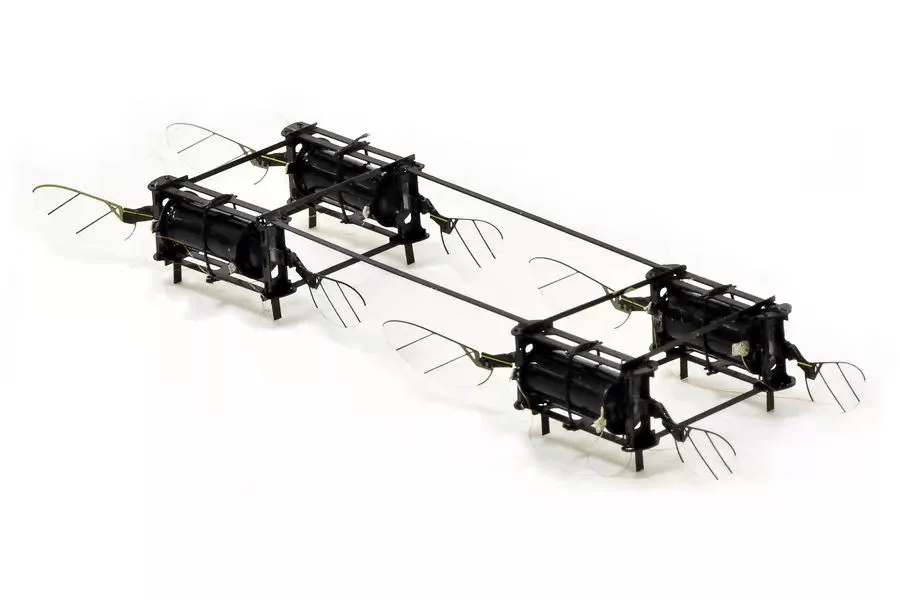
文章图片
还有这样的:

文章图片
这些看似奇特的机器人大多是受自然生物启发而设计的 。 本文的主角是下面这位:一条机器人 , 是的 , 一条 。
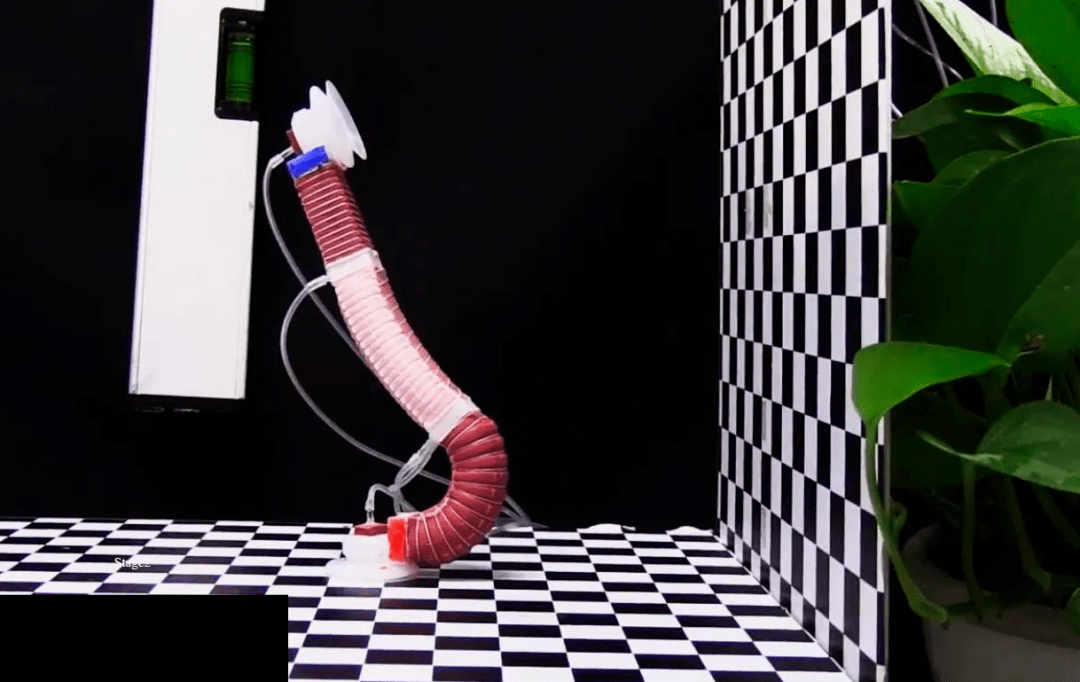
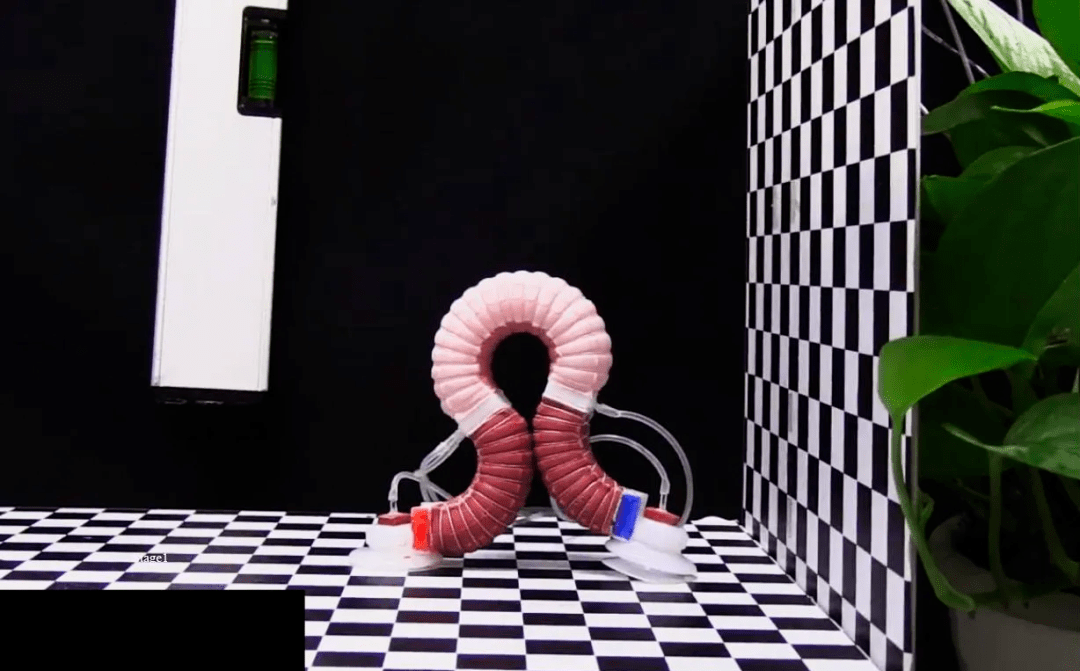
文章图片
这是上海交通大学机械与动力工程学院机器人研究所谷国迎教授团队受尺蠖启发研发的一种新型软体机器人 。
文章图片
论文地址:https://ieeexplore.ieee.org/document/9585535/media#media
尺蠖作为一种幼虫 , 每一个前进步伐都很小 , 但它们能够爬过的地形和方向是非常多样的 。 例如尺蠖能够在水平和垂直表面上缓慢前行 , 并利用其出色的灵巧性在不平坦的地形上前进 。 因此 , 许多研究人员都试图模仿尺蠖构建行动灵活的软体机器人 。

文章图片
对于软体机器人来说 , 在水平面和垂直面之间的过渡是非常困难的 , 因为它们必须既坚固又灵活——足以将一只脚从地面抬起并在垂直的墙壁或表面上立足 。
文章图片
为了实现如尺蠖般的灵活性 , 上海交大的研究团队用 3 个纤维增强的气动执行器模拟尺蠖的身体部分 , 作为气动人工肌肉 。 这种气动机制有助于精确控制机器人的「尾巴」、「头部」和「身体」 。 同时控制系统负责监控执行器的位置 , 协调机器人的整体运动 , 使其在爬行时实现尺蠖蠕动一般的「Ω」形状 。
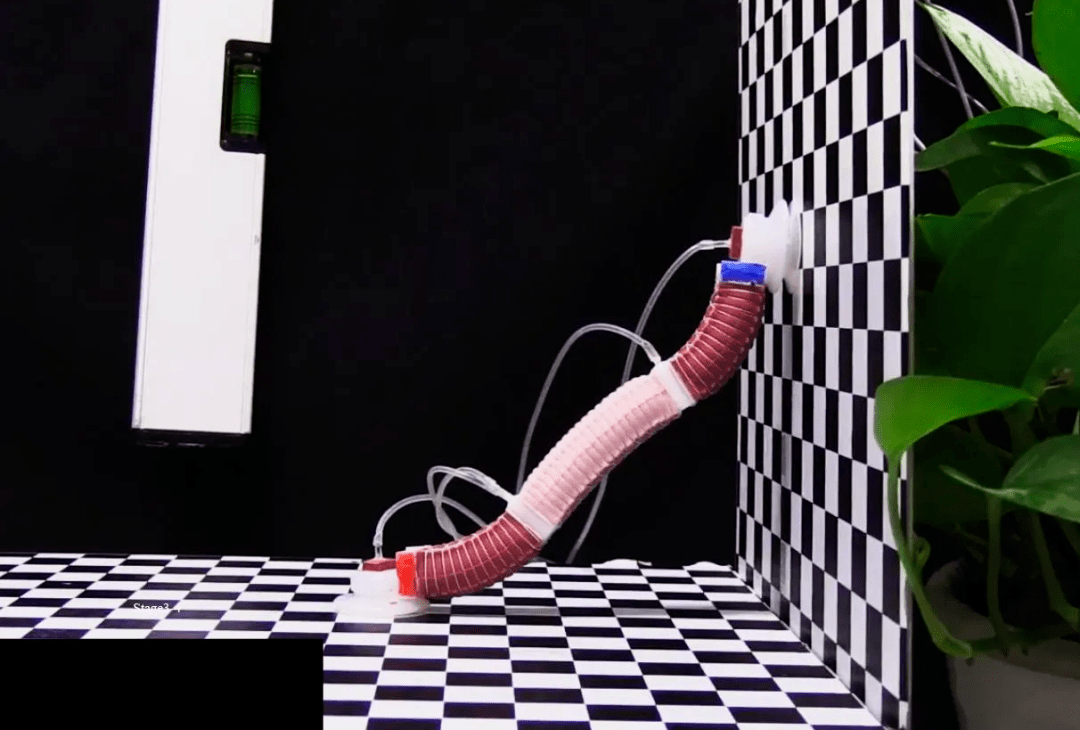
文章图片
【软体|像毛毛虫一样爬上墙,上交大新型软体机器人可以水平垂直过渡移动】该尺蠖机器人的足部采用两个负压吸盘来产生可控摩擦力 。 在气动执行器和吸盘的同步推动下 , 该机器人和真正的尺蠖一样 , 通过伸展身体并控制足部的压力吸盘「迈步前进」 。 它在水平面上可以达到 21 mm/s 的最高移动速度 , 在垂直墙壁上达到 15 mm/s 的最高速度 。 在负载方面 , 它能够在水平面上承载 500 克(约自身重量的 15 倍)的重量 , 在垂直墙壁上可以承载 20 克的重量 。
推荐阅读







- 影像|iQOO 9 系列预热:首发三星 GN5 传感器,150° 鱼眼超广角
- IT|新航空图像拍摄系统Microballoon:可重复使用且成本更低
- 影像|听说今天雷总和苏炳添赛跑了?
- 影像|京东零售集团CEO辛利军空降小米“跑进2022”活动直播间为米粉送福利
- 真容|3000年前法老木乃伊CT下露真容:卷发微匏,长得像父亲
- 影像|性能、视效、充电均属顶尖,全新iQOO 9 Pro再攀性能高峰
- 视界|这部电影里的黑洞竟然和真实黑洞这么像?丨夜问
- 金鸡|华为 2021 新影像金鸡手机电影计划颁奖典礼明天举
- 接线|关于室外监控立杆摄像机安装及立杆规范【详细说明】
- 成功|高功率随机光纤激光成功用于无散斑成像