基准|MIT本科生研发机器人基准“健身房”,可进化出30多种运动能力( 三 )
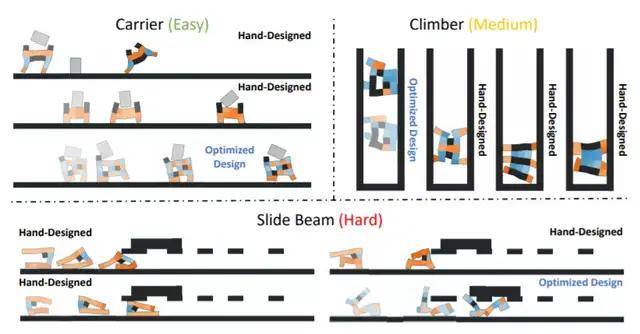
田韵声表示 , 虽然学界已有团队尝试共同进化机器人的形态和控制 , 但只集中于一些较小规模的测试相对以及简单的任务 , 此前尚无大规模测试平台可涵盖几十种复杂多样的任务 。 并且 , 他和团队在 Evolution Gym 平台上测试、评估了当前最前沿的算法 , 结果发现虽然它们能对简单任务“进化”出合理的机器人形态 , 但是在困难任务上比如穿越崎岖不平且晃动的地面时 , 这些算法仍然难以优化出能成功完成任务的机器人 。
所以该研究的两个最终目的是:一是希望 Evolution Gym 可作为一个初步实验平台 , 从最基本的细胞结构开始 , 帮助研究人员发掘出更智能、更高性能的机器人形态 , 甚至是很多全新的、意想不到的形态 , 并且反过来“指导”人类去设计高性能机器人;二是作为一个大规模基准测试平台 , 它可帮助人们开发出更强大的人工智能算法 , 以便进行高效协同设计 , 从而让机器人快速进化到足以完成最具挑战性的任务 。
文章图片
(来源:NeurIPS 2021)
由两位MIT本科生牵头并推进项目 田韵声表示 , 他们的出发点是希望通过一个标准化大规模的平台 , 来对领域内最前沿的水平做出严谨衡量 , 并通过快速物理模拟、以及多样任务设计 , 来给研究人员提供方便 。
因此 , 从一开始研究目标和任务都很明确 , 当实验室大多数博士生忙于自己的项目时 , 田韵声所在团队联系了两位 MIT 本科生 , 也就是前文的贾格迪普·巴蒂亚(Jagdeep Bhatia)和霍利·杰克逊(Holly Jackson)来牵头并推进项目 。
贾格迪普花了几个月时间从头写了模拟系统 , 霍利这边开发出了很多有意思的环境 。 田韵声则和实验室另外一名师兄徐捷指导他们 , 共同实现算法并撰写论文 。

文章图片
动图 | 做运动(来源:NeurIPS 2021)
在投稿截止日期大约半个月前 , 当时田韵声刚从美国飞回国内 , 在隔离酒店里跟其他在美国的合作者们一起昼夜不分地推进项目 。
适逢好几个实验都需要在云服务器上跑 , 并且时间非常紧 , 由于时差的原因 , 一天 24 小时里团队里都有人醒着 , 他们一刻不停地监控实验在服务器上的状态 , 一旦旧的实验结束 , 立马续上新的实验 。 而且两位本科生刚好要准备期末考试 , 导致他们到考试前一天才有空复习 。
如果中稿算是一种成功的话 , 那他觉得这份成功归功于团队每个人的认真负责 , 使得项目推进非常高效 , 虽然还有很多值得改进的空间 , 但是最终得到了审稿人的肯定 。
推荐阅读







- 本科生|“硬核”科技领域求贤若渴,上海与年轻人“一拍即合”
- 直播|Will Smith的回忆录中有哪些最值得学的英文?
- 项目|Snowflake 获 2021 年度数据库称号;Linus 成为 Linux 项目中最强 committer | 开源日报
- Intel|英特尔ARC A380桌面版基准测试数据泄露 与RTX 3050 Ti笔记本GPU相当
- 基准|智源指数CUGE发布,AI大模型有了评测新基准
- 语言|清华大学教授孙茂松等建立机器中文语言能力评测基准“智源指数”
- 文章|本科生顶刊发封面文章!“他,是能成就导师的学生”
- 产品|产品科研和品牌输出为基准点,雷炎科技建造品牌服务终端能力
- Summit|汇数据库创新力量,逐梦数字时代星辰大海,openGauss Summit即将召开
- 声明|微软修改 MIT 项目原作者版权声明惹争议,原来是自动化脚本的错