
文章图片
图片来源:腾讯
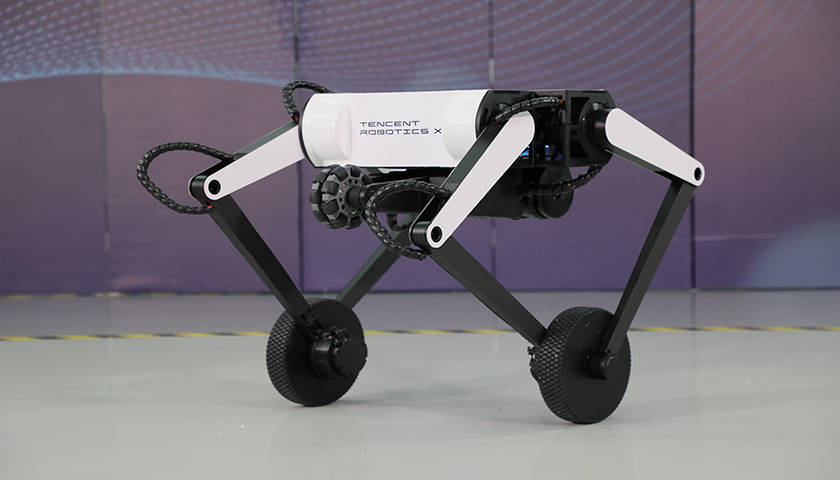
采访人员 | 金依宁6月3日 , 腾讯官方微信公众号宣布旗下Robotics X 实验室增加新成员轮腿式机器人Ollie 。 其兼具轮式优势和腿部能力 , 但尚处研发阶段 , 将在拓展感知、负载等各功能模块后走进更多生活场景 。
足式运动和轮式运动是当前机器人移动能力研究的两大主流方向 。 顾名思义 , 足式机器人灵活 , 能跑能跳 , 轮式机器人更适应平坦道路 , 能像汽车一样稳定、快速运动 。 兼顾两大优势的轮腿式机器人或拥有更多应用场景 。
在滑行和跳跃能力上 , 这款机器人“适应性地应用非线性控制方法” , 可实现360°自由转体 , S线极限滑行等高难度动作 , 跳上40厘米台阶 , 垂直起跳可最高达60厘米 。
同时 , 其采用机器人全身动力学 , 有效控制机器人的全身姿态 , 提升抗外界干扰能力 , 面对实验击打可以稳住不倾倒 , 较为平稳地实现上坡下梯 。
在计算能力上 , Ollie能够事先规划运动轨迹 , 从而得到整个运动的关节电机位置、速度和关节力矩的参考值序列 , 以实现前空翻动作 。
文章图片
据腾讯介绍 , 目前其负载第三条臂实现的相关技能还处于初步探索阶段 , 已实现在三轮稳定模态下搭载机械臂 , 完成简单操作任务 。
文章图片
该机器人相关研究论文已被今年 ICRA 会议(IEEE International Conference on Robotics and Automation国际机器人与自动化会议 , 机器人领域最有影响力的国际学术会议之一)收录 , 题名为《Balance Control of a Novel Wheel-legged Robot: Design and Experiments》 。
文章图片
Ollie是Robotics X 实验室发布的第四代机器人 , 今年3月 , 该实验室发布的首个软硬件全自研、实现腿和轮自动切换的多模态四足机器人Max曾引发广泛关注 。
【能力|腾讯发布全新轮腿式机器人Ollie,能上坡下梯还会前空翻】腾讯Robotics X实验室成立于2018年3月15日 , 现任主任是著名计算机视觉和多媒体技术专家张正友 。 该实验室主攻移动、灵巧操作和智能体三大机器人核心通用技术 , 与通用人工智能、AI+医疗并称腾讯AI领域的三大核心战略 。
推荐阅读







- bleu|字节跳动火山翻译上新 38 个稀有语种,翻译能力再升级
- Samsung|三星预告1月11日发布Exynos 2200芯片组 RDNA 2 GPU加持
- 手机|一加10 Pro宣传视频曝光:将于1月11日14点发布
- 语境|B站2021个人年度报告发布:你共计看了多少个视频
- 功能|Linux 微信官方版 2.1.1 正式发布
- 硬件|闪极140W多口充电器发布:首发399元 支持PD3.1
- 办公|统信UOS助手发布:支持“一键秒传”
- 能力|有了长续航的独立通信手表,就不必为出门没带手机而焦虑了
- 芯片|Exynos 2200 来了!三星官宣 1 月 11 日发布新 Exynos 处理器
- 设计|宇瞻发布 NOX 系列 DDR5 电竞内存,速度最高 7200MHz