文章图片
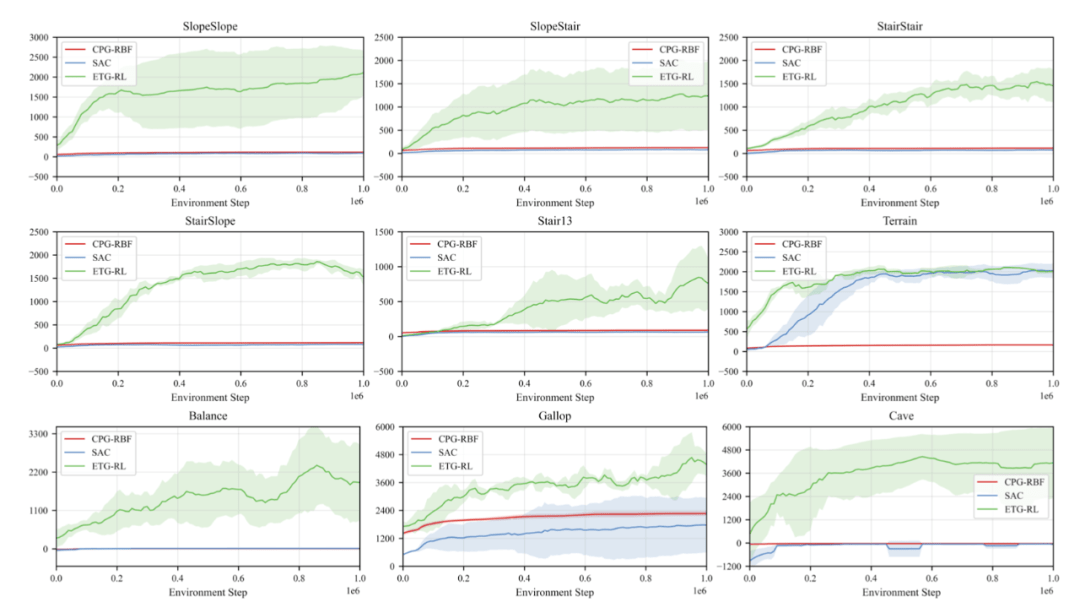
图四、实验结果
百度的工作展现出 , 基于自主学习的方法在四足机器人控制上具有完全替代甚至超越经典算法的潜力 , 有可能成为强化学习和进化学习在复杂非线性系统中开始大规模落地和实用化的契机 。 这不是百度在机器人方向上做的第一个强化学习工作 , 早在 18 年 , 他们就尝试将人工干预引入到强化学习中 , 以推进强化学习应用在四轴飞行器控制等高风险的硬件场景 。
未来 , 相信强化学习会是四足机器人控制领域重要的技术突破口 , 有效推动足形态机器人走进我们的日常生活中 。 该模型和训练方法同步开源于飞桨机器人算法库 PaddleRobotics 和强化学习框架 PARL;其中四足机器人和复杂地形仿真也开放于飞桨强化学习环境集 RLSchool, 以便于更多该领域的专家和工程师对比研究 。
参考:
完整仿真效果和真机视频:https://www.bilibili.com/video/BV1a44y1b7nQ
论文:https://arxiv.org/abs/2109.06409
强化学习框架 PARL:https://github.com/PaddlePaddle/PARL
开源仿真环境 RLSchool:https://github.com/PaddlePaddle/RLSchool
飞桨机器人控制算法框架 PaddleRobotics:https://github.com/PaddlePaddle/PaddleRobotics
推荐阅读







- 相关|科思科技:无人机地面控制站相关设备产品开始逐步发力
- Baidu|百度抢跑元宇宙 却默认“输给”字节?
- 华能|全球首座!华能百兆瓦级分散控制储能电站投运
- Tencent|继百度网盘后腾讯微云也已解除限速 不用单独下载App
- 词条|百度百科上线2500万词条,超750万用户参与共创科普知识内容
- Baidu|百度网盘青春版正式上线 只能传3次文件被吐槽是“一次性App”
- 青春|百度网盘青春版正式上线:免费空间 10GB,支持无差别速率下载
- Create|什么是元宇宙游戏?百度《希壤》成国内第一个吃螃蟹的人
- 量子|百度量子平台2.0重磅发布!推动构建量子计算领域繁荣生态
- 汽车|Apollo迎来7.0重大升级,百度自动驾驶开放平台迈向工具化时代