文章图片
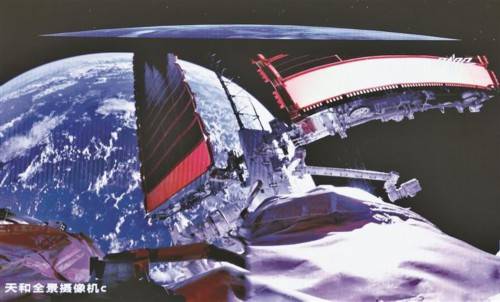
▲空间站核心舱机械臂格外引人注目 。
此次出舱活动首次检验了航天员与机械臂协同工作的能力 , 雄伟有力的空间站核心舱机械臂格外引人注目 。
空间站核心舱机械臂展开长度为10.2米 , 最多能承载25吨的重量 , 是空间站任务中的“大力士” 。 其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节 , 每个关节对应1个自由度 , 具有七自由度的活动能力 。
通过各个关节的旋转 , 空间站核心舱机械臂能够实现自身前后左右任意角度与位置的抓取和操作 , 为航天员顺利开展出舱任务提供强有力的保证 。
除支持航天员出舱活动外 , 空间站核心舱机械臂还承担舱段转位、舱外货物搬运、舱外状态检查、舱外大型设备维护等在轨任务 , 是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统 。
为扩大任务触及范围 , 空间站核心舱机械臂还具备“爬行”功能 。 由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案 , 肩部和腕部关节配置相同 , 意味着机械臂两端活动功能是一样的 。 机械臂通过末端执行器与目标适配器对接与分离 , 同时配合各关节的联合运动 , 从而实现在舱体上的爬行转移 。
【关节|灵活的空间站“大力士” 核心舱机械臂为出舱活动提供有力支撑】据悉 , 航天科技集团五院在抓总研制过程中 , 在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均取得创新突破 , 全部核心部件实现国产化 。
(据新华社)
推荐阅读







- AMD|AMD 350亿美元收购赛灵思交易完成时间推迟 预计明年一季度完成
- 协同|网文论︱网络文学与AI写作:人机协同演化时代的文学之灵
- 网络|5G真香,赛灵思加入Open RAN政策联盟
- the|美国新冠病例激增:老牌香薰蜡烛频遭差评 真相竟是嗅觉失灵
- 昆虫|韦布望远镜技术细节大公开:热灵敏度
- 平台|百度智能云推出数字人平台“曦灵”
- 生活|HDZ城市行深圳站:AIoT时代,如何抓住智联生活的战略机会点?
- 技术|John Roese:迈进 2022,迎接改变生活的科技力量
- 定义|【智库声音】美国《人工智能风险管理框架》概念先导!重新定义AI风险,指出管理框架的灵活可选性
- 电极|科学家用锗生产最灵活自适应晶体管