GitHub|Transformer拿下CV顶会大奖,微软亚研获ICCV 2021最佳论文( 四 )
- 论文 3:Viewing Graph Solvability via Cycle Consistency
- 作者机构:特伦托大学等
- 论文地址:https://openaccess.thecvf.com/content/ICCV2021/papers/Arrigoni_Viewing_Graph_Solvability_via_Cycle_Consistency_ICCV_2021_paper.pdf
文章图片
论文摘要:在运动恢复结构(structure-from-motion , SFM)中 , 视图图(viewing graph)是一种顶点与相机对应、边代表基本矩阵的图 。 该研究提供了一种新的公式和算法 , 用于确定视图图是否可解(即它唯一地确定一组投影相机) 。 已知的理论条件要么不能完全描述所有视图图的可解性 , 要么涉及求解含大量未知数的多项式方程组而非常难以计算 。 该论文的主要成果是提出一种利用循环一致性来减少未知数的方法 。 该研究通过以下 3 种方法来进一步理解可解性:(i) 完成对最多 9 个节点的所有先前未定最小图的分类;(ii) 将实际可解性测试扩展到具有最多 90 个节点的最小图;(iii) 通过证明有限可解性不等于可解性明确回答了一个开放型研究问题 。 最后 , 该研究以一个真实数据的实验表明在实际情况中出现了无解的图 。
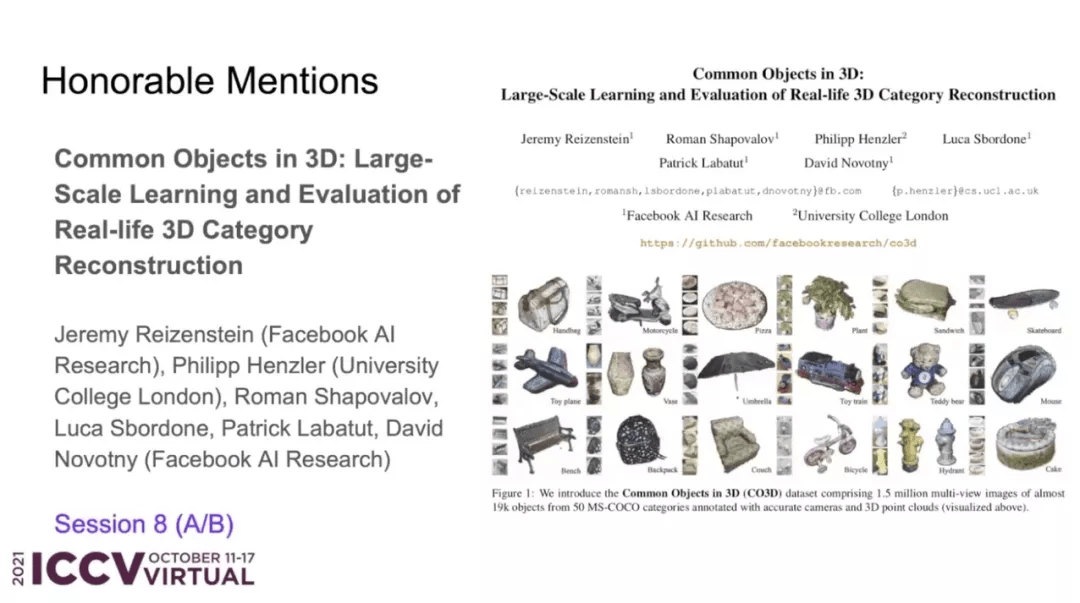
- 论文 4:Common Objects in 3D: Large-Scale Learning and Evaluation of Real-life 3D Category Reconstruction
- 作者机构:Facebook AI 研究院、伦敦大学学院
- 论文地址:https://arxiv.org/pdf/2109.00512.pdf
文章图片
论文摘要:由于缺乏真实的以类别为中心的 3D 标注数据 , 传统的 3D 物体类别学习方法 , 主要是在合成数据集上进行训练和评估 。 该研究的主要目标是通过收集与现有合成数据类似的真实世界数据来促进该领域的进展 。 因此 , 这项工作的主要贡献是一个名为「Common Objects in 3D」的大规模数据集 ,, 其中含有真实的多视角物体类别图像 , 并附有相机姿态和 3D 点云标注真值 。 该数据集包含来自近 19,000 个视频的 150 万帧捕获了 50 个 MS-COCO 类别的物体 , 因此它在类别和物体的数量方面都比其他数据集具有明显优势 。 研究者利用这个新数据集对几种新视图合成和以类别为中心的 3D 重建方法进行了大规模评估 。 此外 , 该研究还贡献了 NerFormer——一种新颖的神经渲染方法 , 利用强大的 Transformer 来重建仅给定少量视图的物体 。
PAMI TC 奖
今年 ICCV 上的 PAMI 奖依旧包括四大奖项 , 分别是 Helmholtz 奖、Everingham 奖、Azriel Rosenfeld 终身成就奖和杰出研究者奖 。
PAMI 是 IEEE 旗下的期刊 , 是模式识别和机器学习领域最重要的学术性汇刊之一 , 有着很高的影响因子和排名 。
推荐阅读







- GitHub|小米 12 / Pro / X 系列内核源码已公开,基于 Android 12
- 模型|经逆向工程,Transformer「翻译」成数学框架 | 25位学者撰文
- 用户|全新微软 Win11 WSA 开源工具上线 GitHub:支持双击 APK 安装
- 手机|四季度5G手机出货已超4G:苹果iPhone拿下销量、收入双料第一
- Tesla|三星拿下特斯拉订单打造全新车载电脑芯片
- 硬件|郭明錤:最坏时间已过 大立光专利战胜出 可望拿下中国一线品牌客户长单
- 王雅|一波三折后成功“拿下”!又一项世界级大会落地成都!
- 查尔斯·巴贝奇|曾遥不可及的机械美学,如今被OPPO用7699元拿下了。
- Huawei|华为申请元OS商标:此前已拿下鸿蒙元服务
- Alibaba|Gartner:阿里云拿下四个全球第一 超越亚马逊、微软