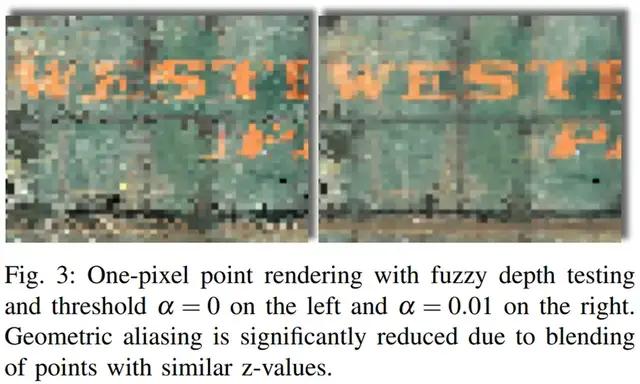
点栅格化的前向传递可以分解为三个主要步骤 , 分别是映射、遮挡检查和混合 。 下图 3 展示了使用单像素点栅格化方法渲染的两张彩色图像的示意图:
文章图片
点栅格化单元的后向传递首先计算参数相关的渲染器函数(1)的偏导数 , 如下公式(8)所示 。 使用链式法则 , 研究者可以计算损失梯度并传递到优化器 。

文章图片
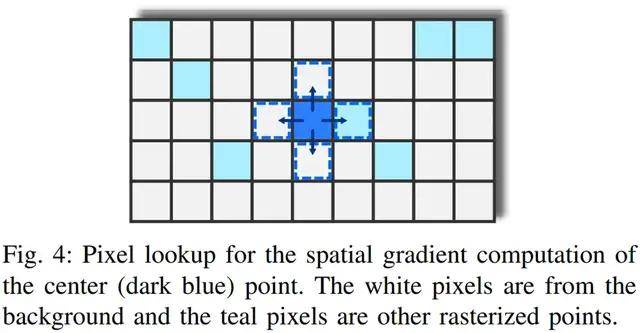
如下图 4 所示 , 研究者通过在每个方向上将 p = (u, v) 移动一个像素来计算近似值 。
文章图片
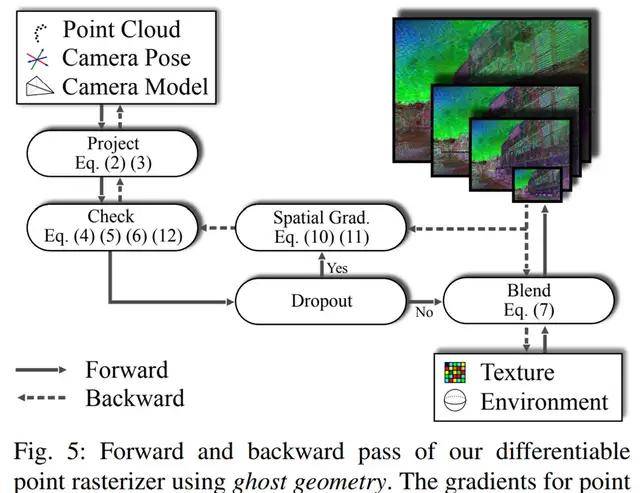
在下图 5 中 , 在混合阶段前插入一个 dropout 层 , 该层将点云分割为两个集 。 第一个集正常地混合 , 并生成输入图像;第二个集 , 研究者称之为假性触控点(ghost point) , 不在前向传递中使用 。
文章图片
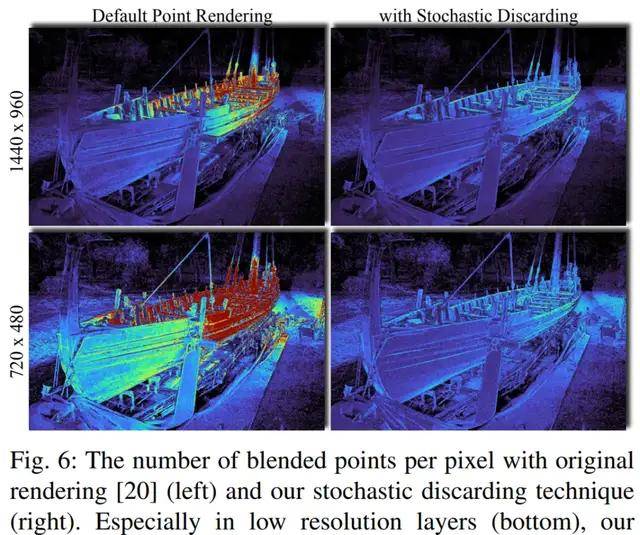
通过进一步的性能分析 , 研究者发现即使在小的分辨率层 , 数百个点也可以通过单个像素的模糊深度测试 。 为了将这一数字降低到合理的范围 , 研究者采用了类似于 [72] 的随机点丢弃方法 。 随机丢弃的效果如下图 6 所示 , 其中基于渲染点的数量对每个像素进行上色 。
文章图片
实验展示
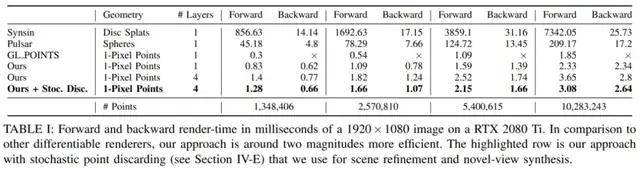
在实验部分 , 研究者首先针对前向和后向单像素点栅格化的运行时(runtime)与其他可微渲染系统进行了比较 。 下表 1 展示了自己的方法与 Synsin、Pulsar、使用 GL POINTS 方法的 OpenGL 默认点渲染的 GPU 帧时间的度量结果 , 计时时仅包含栅格化本身 , 不包括神经网络和色调映射器 。 可以看到 , 研究者的方法在所有指标上均优于其他方法 。
文章图片
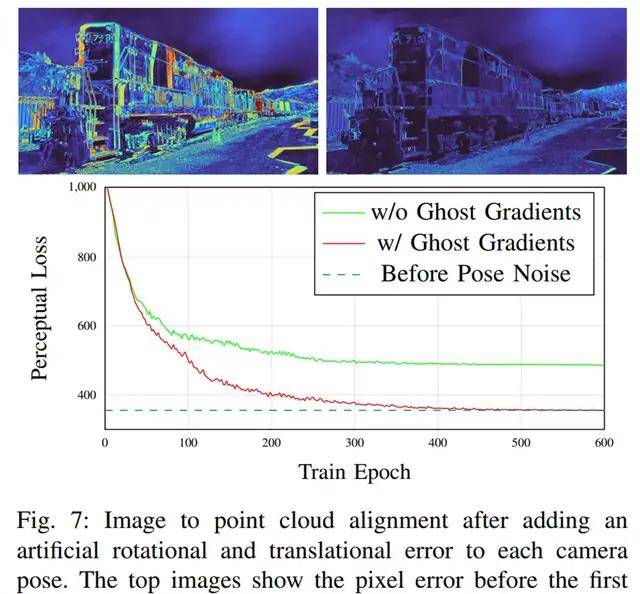
研究者提出了用于可微单像素点渲染的假性梯度(ghost gradient) , 并表示假性梯度在场景细化过程中可以提升梯度准确性和增强稳健性 。 他们通过一个消融实验来确认这一说法 。 实验结果如下图 7 所示 , 图(上)展示了姿态优化前后合成图像和真值之间的像素误差 。 可以清楚地看到 , 在添加位置和旋转噪声之前 , 使用假性梯度可以使感知损失收敛到初始解 。
文章图片
新视角合成 。 除了场景细化外 , 该方法还可以在多视角立体数据集上合成新的视图 。 下图 8 展示了合成的两个测试帧 。 比较结果可以发现 Synsin、NPBG 和该研究所用方法可以很好地合成参考帧 , 而 Pulsar 和 NRW 的输出稍差 。
推荐阅读







- 截图|靠抄袭对标苹果?心动黄一孟指责小米新版游戏中心抄袭TapTap
- ASUS|华硕预热ROG Flow Z13:称其是“全球最强悍的游戏平板”
- 平板|消息称 ROG Flow Z13 游戏平板搭载锐龙 6000 处理器
- Lenovo|联想将推出135W Type-C充电器:游戏本告别“砖头”
- Samsung|三星注册Odyssey Flex/Ark商标 或用于新款游戏显示器
- 中国|411 家游戏企业签署防沉迷公约,95% 游戏添加适龄提示
- 赛道|声网发布实时互动场景创新生态报告,预测RTE行业市场规模将达千亿
- 游戏|PC Gamer:2021年的PC游戏正在离桌面PC而去
- ti|英伟达明年1.5将举办特别活动 游戏相关新情报公开
- 画质|AMD RSR 分辨率缩放技术曝光:基于 FSR,无需游戏适配即可使用