随着半导体生产工艺的不断发展 ,更精密、集成度更高是行业发展的趋势 。 目前 , 制造工艺已经进入亚纳米时代,线宽都在30-180 纳米之间 , 对生产设备的精度要求越来越严格 , 因此 , 除了设备本身的工艺水平需要达到生产要求以外 , 其所处的生产环境——洁净室的各项指标也必须被严格地控制 , 包括:洁净度、温湿度、照度、气流方向、振动静电、磁场以及有害气体等 。 其中的温湿度控制是重点 , 其控制的效果直接影响着生产的优良率 。 目前半导体洁净室对温湿度的控制范围通常为: 温度22+/-0.5℃ , 湿度45+/-3%RH 。 本文通过对现有洁净室温湿度控制系统的研究 , 引入模糊控制 , 以提高温湿度控制的实际效果 。
1 温湿度处理过程
对空气单纯地加热或制冷(未达到饱和状态)过程 , 是含湿量保持不变的过程 , 即绝对湿度保持不变的过程 。 湿空气经过盘管加热 , 温度升高而相对湿度下降;相反,对冷却过程 , 温度下降而相对湿度相应升高 , 因此我们可以得出 , 温度和相对湿度是两个不同方向的控制量 , 要使温湿度同时向相同的趋势变化 ,则单纯靠加热/冷却过程是不能实现的 。 冷却去湿过程是湿空气经冷却达到饱和后继续制冷的过程,湿空气经过冷却盘管结露析出水滴从而降低了绝对湿度,起到去湿的作用 。 因而我们可以将空气处理过程分为加热、加湿、降温及降温去湿等四个过程 。 图1 中,横坐标为含湿量 , 即每千克空气所含有的水蒸量;纵坐标为摄氏温度 。 根据目标状态 , 绝对湿度线和目标温度线可以划分为四个控制区: Zone 1 , Zone 2 , Zone 3 , Zone 4 。
为了达到目标温湿度控制点 , 其对应的温湿度控制分区处理过程为:在Zone 1 的范围内 , 先降温去湿 , 再加热 。 在Zone 2 的范围内 , 先降温 , 再加湿 。 在Zone 3 的范围内 , 先加热 , 再加湿 。 在Zone4 的范围内 , 先降温去湿 , 再加热 。
定义:D—控制对象含湿量 , T—控制对象温度 。
通常情况下 ,对于设定值温度22+/-0.5℃ , 湿度45+/-3%RH 而言 , Zone1 和Zone3 的情况比较多 , 即需要先降温去湿然后再加热或者先加热然后再加湿 。
2 洁净室温湿度处理基本流程及常见问题
2.1 洁净室温湿度处理基本流程
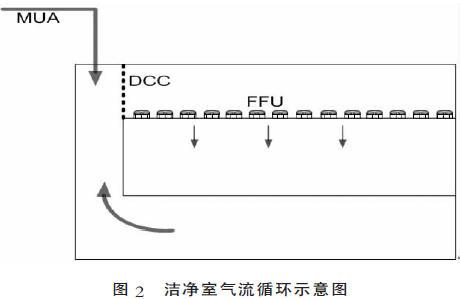
前摄像头:5.0MP 后摄像头:13.0MP AF半导体洁净室厂房通常采用新风空调箱(Makeup Air Unit , MAU)+风机过滤单元(Fan Filter Unit , FFU)+干冷盘管(Dry Cooling Coil , DCC)的设计 , 即新风空调箱MAU 将具有一定洁净等级和温湿度的新风送到洁净室的回风通道中 , 与循环回风进行混合后进入洁净室吊顶上方 , 通过风机过滤单元FFU 后进入洁净室生产区域 , 从而基本达到无尘室的温湿度、洁净度及正压度的要求 。 由于整个洁净室内摆满了各种生产机器 , 这些机器都保持持续的运转 , 会产生大量的热量 , 这些热量又将通过回风通道内的干盘管DCC 进行冷却而被带走 ,从而达到维持长时间稳定的温湿度环境 。 基本循环如图2 所示 。
文章图片
对于洁净室的温湿度控制 , 最主要的两块是新风空调箱和干盘管 。 新风空调箱除了要保证外界大气经过其中的初、中和高效过滤网 , 把空气中的粉尘颗粒过滤掉外 , 还要根据洁净室里面的温湿度情况调整出风口的温湿度 , 以保证送入的新风在规定的温湿度范围内 。 而干盘管是根据洁净室里面安装的温湿度传感器测量的值来调整干盘管冷水阀的开度 , 进而调节回风和送风混合后的温湿度 , 以保证满足半导体工艺的温湿度需求 。
由于每种工艺制程设备的发热量大不相同 , 导致洁净室内的机台发热量分布不均匀 。 例如炉管机台的发热量相较于其他设备大得多(基本在3-5倍之间) , 因此必须在洁净室内用干盘管DCC 带走这些热量 。 通常要求同一制程的气流经过同一组DCC , 在建筑已经确定的情况下 , 制程的分布要与回风道垂直 。 如果条件允许 , 最好是将不同制程的区域隔开 , 这样既可避免金属粒子污染 , 又能提高温湿度控制的稳定性 。
通常情况下 ,洁净室的温湿度控制在22+/-0.5℃ , 45%+/-3%RH , MAU 的送风温度基本控制在21℃-21.5℃ , 在与循环风混合后 , FFU 出风口的温度控制在22℃ , 这样 , 经过工作层面后温度将会再上升 , 在机台满载的情况下上升温度会基本稳定 。
2.2 温湿度控制中的常见问题
在MAU 的温湿度处理过程中 , 为了解决除湿问题 , 通常采用湿度优先的方法 , 冷水阀主要用来除湿 , 同时也造成温度的下降 , 然后通过热水阀的再热 , 使温湿度均能达到所要求的值 。 这样的做法虽然可以满足设计要求 , 但在相当多的时候 , 冷热水阀使能量相互抵消 , 造成了能源的浪费 。 另外 , 如果进入洁净室的新风温度过高 , 将导致整个洁净室的热负荷加大 , DCC 开度增大以抵消新风带来的热负荷;如果进入洁净室的新风的温度过低 , 将使得在DCC 开度为零时都无法达到环境温度的要求 。 根据统计数据 , 空调系统的能耗占整个半导体厂的能耗的30%-35% ,因此对空调设备进行优化控制 , 选择合理温湿度设定值 , 对提高整个洁净室温湿度控制的稳定性及节能具有重要的意义 。
3 温湿度控制系统实现
基本上 ,现在洁净室温湿度要求为22+/-0.5℃ , 45%+/-3%RH , 当然根据生产工艺的需求 , 对温湿度的要求也不尽相同 。
3.1 新风空调箱的温湿度控制
3.1.1 新风空调箱基本结构
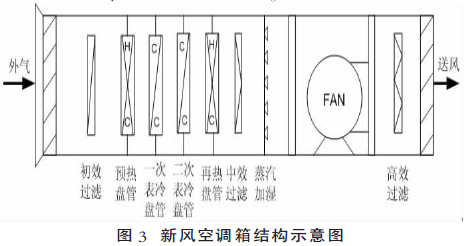
新风空调箱基本结构如图3 所示 , 其处理流程如下:空气过滤———包括初效、中效、高效三部分;温度处理———包括预热盘管、一次表冷盘管、再热盘管三部分; 湿度处理———包括一次表冷盘管、二次表冷盘管、蒸汽加湿三部分 。
文章图片
3.1.2 温度处理过程
预热盘管的作用是对外气进行预加热 。 在外界气温较低 , 接近零度时 , 为了避免盘管在气温低于零度时被冻坏 , 需对外气进行加热 , 通常是加热到12℃ 。
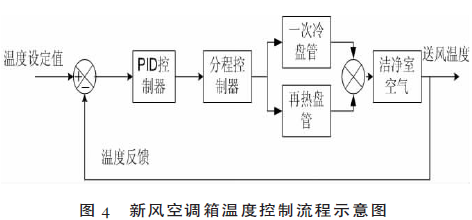
控制送风温度时 , 将送风温度与其设定值进行比较 , 通过PID 控制算法 , 得出一个计算值 , 根据该计算值来确定一次表冷盘管与再热盘管阀门开度的大小 , 其控制流程如图4 所示 。
文章图片
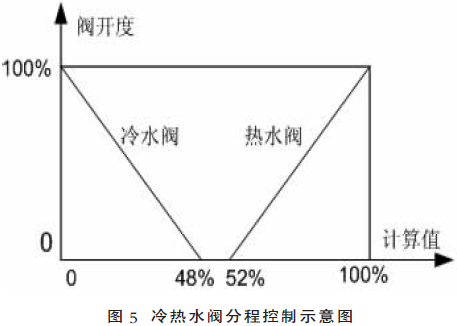
在整个PID 闭环控制环节中引入分程控制器模型 , 如图5 所示 , 将PID 控制算法得出的计算值分为两部分 , 0-48%及52(%)-100% , 它们分别对应一次表冷盘管及再热盘管 , 这样就避免了冷热水盘管同时打开而导致能源浪费 。 同时 , 在冷热水切换的交界处48%-52% , 设置了死区 , 即当外气的温度与送风温度设定值相当接近时 , 热水阀和冷水阀都处于关闭(阀开度都为0)的状态 , 以避免冷热水在临界状态时不停地切换 ,加速了执行机构的损坏 , 同时又能减少能源的消耗 。
文章图片
3.1.3 湿度处理过程
为了避免和温度之间的耦合关系 , 新风出口湿度的设定值通常不采用相对湿度作为控制值 , 而是通过和温度设定值综合计算后得出其绝对湿度 , 以露点温度或含湿量来表示 。 本文以露点温度为例 。 将计算所得的露点温度设定值作为整个MAU 出
口湿度的设定值 。 根据送风露点温度并与露点温度设定值进行比较 , 通过PID 控制算法 , 得出一个计算值 , 根据该计算值来确定表冷阀和加湿阀开度的大小 , 其控制流程与温度控制类似 , 同时也引入了分程控制 , 避免临界状态下加湿与除湿之间不断切换而导致的湿度控制的波动 。
3.2 洁净室温湿度控制
3.2.1 洁净室温度控制
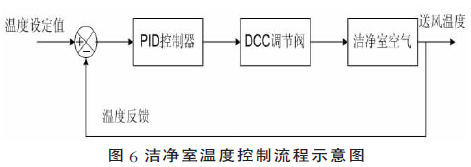
洁净室内的温度PID 控制流程如图6 所示 , 采用的是基本的PID 控制 ,由于洁净室本身的大空间而造成的大惯性、大时滞性 , 在设置PID 参数时通常将积分时间设置为零 , 以防止系统过调节而产生振荡 。
文章图片
洁净室温度主要由DCC 来调节 ,但同时受新风送风温湿度的影响 , 如果给定太高的温度 , 进入洁净室和循环风混合后 , DCC 就需要更大量的冷量进行冷却 , 这就直接导致能源的浪费;如果给定太低的温度 ,进入洁净室和循环风混合后 ,即使DCC 的开度为零 , 整个洁净室的温度却仍然太低 , 这将使得整个洁净室的温度超标 。
3.2.2 新风空调箱温湿度设定值控制
新风空调箱送风温度设定值的选取是比较关键的 , 它必须能够最佳适应当前洁净室内温度的需求 。 如果给定太高的温度 , 进入洁净室和循环风混合后 , DCC 就需要更大量的冷量进行冷却 , 这就直接导致能源的浪费;如果给定太低的温度 , 进入洁净室和循环风混合后 , 即使DCC 的开度为零 , 整个洁净室的温度却仍然太低 , 这将使得整个洁净室的温度超标 。 因此 , 对于MAU 新风送风温度设定值的选取是十分重要的 , 必须在确保系统在控制范围内并尽可能达到节能的目的 。 在此 , 我们引入模糊控制的思想 , 通过对洁净室温度偏差及偏差变化率的模糊规则变换 , 得出新风空调箱送风温度设定值SP 。 整个程序运行的流程如图7 所示,程序运行后 , 将获得新的SP 。

文章图片
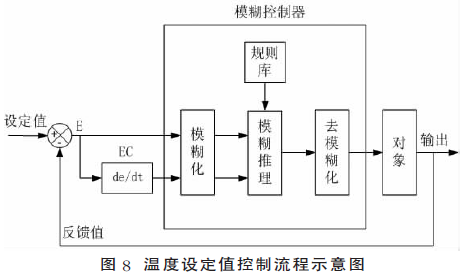
基本的模糊控制系统如图8 所示 。 系统中的模糊控制器是两输入一输出的,其输入量是系统的偏差E 和偏差变化率EC, 而这两个量具有确定的数值, 是两个清晰量 。 整个模糊控制器由四个部分组成:模糊化 , 模糊规则库 , 模糊推理及去模糊化 。 模糊化的作用是将一个确定的点映射为输入空间的一个模糊集合 。 通过模糊化处理,得到模糊的偏差量E 以及模糊的偏差变化率EC 。 其中模糊的偏差量E 语言值集合有七种取值 , 分别是NB(负大)、NM(负中)、NS( 负小)、O(零)、PS(正小)、PM(正中)、PB(正大) 。 模糊的偏差变化率EC 的语言值集合也有七种取值,分别是NB (负大)、NM (负中)、NS(负小)、O(零)、PS(正小)、PM(正中)、PB (正大) 。
文章图片
模糊规则库是由若干个模糊“if-then”规则的总和组成 , 它是模糊系统的核心部分 , 系统其他部分的功能在于解释和利用这些模糊规则来解决具体问题 。 在模糊规则控制器中编辑模糊控制规则,不同的模糊控制器一般有不同的模糊控制规则,因
为模糊控制规则实质上是将操作员的控制经验加以总结而得出一条条模糊条件语句 。 在本次实际设计中 , 共采用了49 条“if-then”规则 , 根据这些规则 , 得出如表1 所示的模糊控制规则表:

文章图片
模糊推理将模糊规则库中的模糊“if-then”规则转换成某种映射 , 即将输入空间上的模糊集合映射到输出空间上的模糊集合 。 根据这些规则进行模糊推理得到一个模糊集, 即模糊控制量U, 再通过去模糊化环节,将其转化为清晰的数字控制量,达到调节MAU 温度设定的目的 。
3.2.2 洁净室相对湿度控制
洁净室相对湿度的控制则由MAU 出口新风湿度进行调节 , 将洁净室相对湿度测量值与相对湿度设定值进行比较 , 由此计算出所需要MAU出口新风相对湿度 , 其计算过程与温度设定值的计算过程类似 ,然后配合MAU 出口新风温度设定值 , 计算出MAU 的出口露点温度设定值 ,由此来控制MAU 出口的湿度 。
4 结论
实际应用中 , 通过在洁净室温湿度控制系统中引入模糊控制环节和分程控制环节 , 发挥模糊控制鲁棒性强、动态响应好、上升时间快、超调小的特点, 大大提高了整个控制系统的动态响应特性 , 同时又具有PID 控制器的动态跟踪品质和稳态精
【控制|半导体洁净室温湿度控制方案】度 ,半导体洁净室的环境温湿度得到了更好的控制 , 波动更小 , 同时也减少了能源的浪费 。
推荐阅读







- 信息|评论丨“不得利用算法控制热搜”,对平台企业是场“大考”
- 风机|洁净室风机过滤机组的安装步骤和用途你知道吗?
- 控制|Redmi K50系列全球首发天玑8100!本月发布
- 控制系统|西安明德理工学院成功获批增设2个新专业
- 动态|荣耀 Magic4 Pro 首次搭载 Pixelworks 视觉显示技术:动态自适应 HDR、平滑亮度控制等
- 的要求|超纯水技术提升半导体行业再生水利用 实现高价值回报
- 水稻种子|我国科学家破译控制水稻种子活力的“遗传密码”
- 视点·观察|俄乌战争“扎芯 ” 国产半导体企业机会来了?
- 信息|3月1日起不得利用算法控制热搜
- TSMC|台积电:半导体短缺预计2-3年后才能解决