文章图片

文章图片
文章图片
文章图片
文章图片
基于厘米级定位、超低功率、强抗干扰、超大容量等技术特点 , UWB(超宽带)技术在消费电子、智能汽车等领域的应用前景被赋予厚望 。
值得一提的是 , 利用UWB雷达还可实现舱内活体检测、脚踢尾箱等 , 这意味着新一轮座舱感知革命已经开启 。
UWB雷达基本原理UWB雷达的工作原理与UWB定位完全不同 。 UWB雷达系统不需要UWB标签的存在 , 其工作原理与飞机和汽车上用的各类雷达类似 。
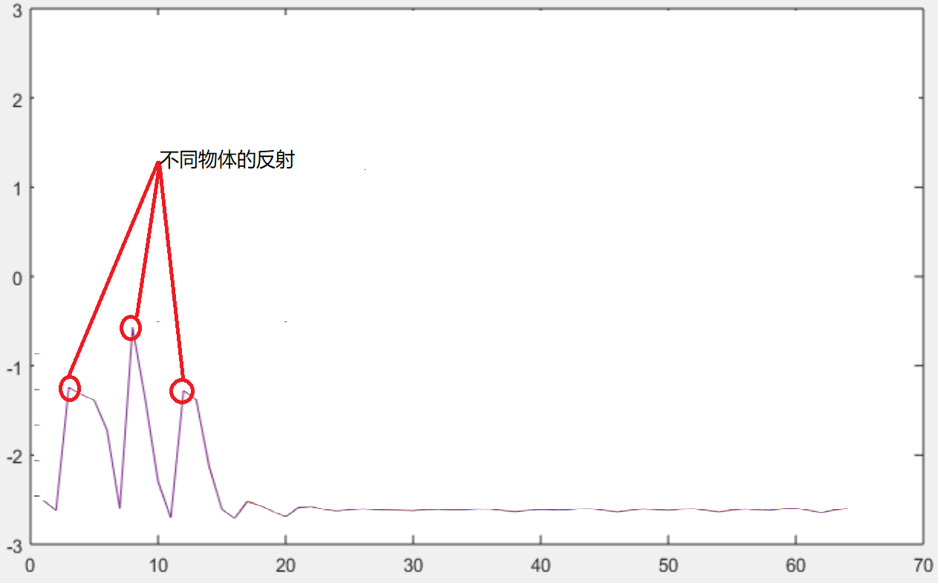
UWB雷达发射UWB脉冲信号 , 并接收该脉冲信号经障碍物反射后的回波 , 通过对回波扰动的分析来判断UWB雷达附近是否存在物体(或人) 。 具体来讲 , UWB雷达通过接收到的CIR(Channel Impulse Response信道脉冲响应)来探测周围物体及其运动 。
1、当UWB雷达周围有物体时 , CIR对应位置就会有脉冲峰 。
2、当周围物体运动时 , 由于多普勒效应 , 对应的CIR值就会变化 , 可通过分析CIR频谱来估计运动状态 。 目前常见500M带宽的UWB芯片 , 静态位置分辨率较低 , 但可以用作动态雷达 , 来检测物体的运动 。
UWB雷达原理图
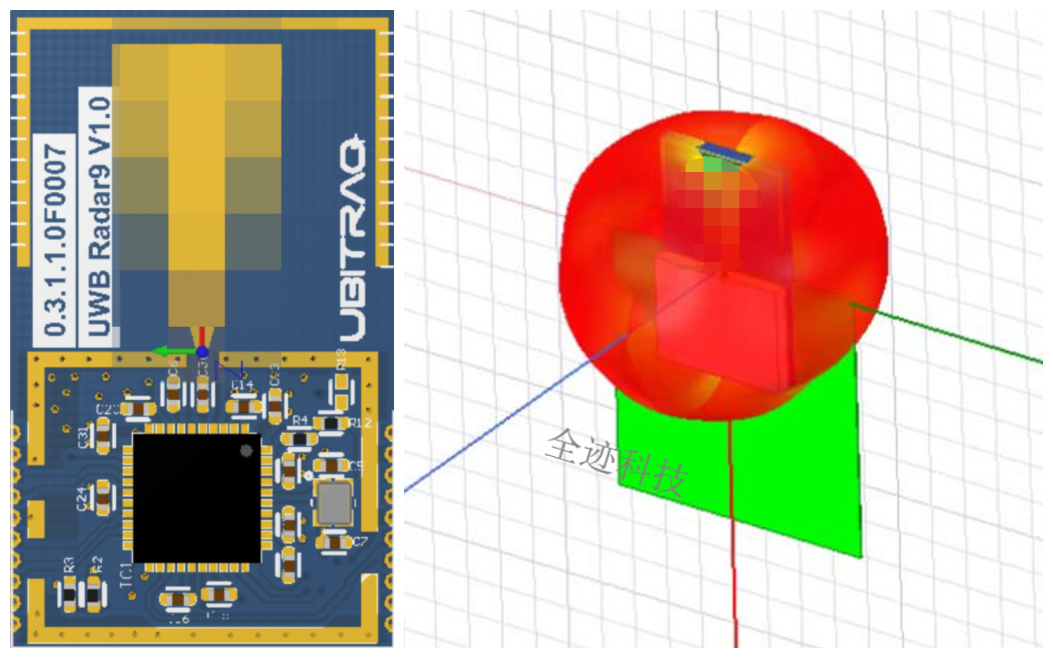
UWB雷达性能特点以UWB行业头部厂家全迹科技UWB雷达V1.0算法为例 , 具有以下性能特点:
1、灵敏度和检测范围
灵敏度和检测范围跟算法、天线设计、物体反射面积、物体运动幅度等因素有关 , 算法能够完成以下检测:
1)检测微小的呼吸运动 , 已实现天线正面 , 距离不小于0.8米 , 视场角±60°范围内的呼吸运动的检测 。
2)检测环境内的人体活动(包括行走 , 上身、胳膊、头部等的微小摆动等) , 可实现天线正面 , 距离不小于1.6米 , 视场角±60°范围内的人体活动的检测 。
2、响应速度
波形实时变化 , 可以跟踪频率15Hz内的快速运动 , 比如快速的踢脚运动 。
3、系统组成
UWB雷达目前有两种模式 。 一种是单锚点模式(收发一体 , 单颗独立运行) , 一种是双锚点模式(1发+1收 , 必须组合运行) 。 单锚点模式覆盖范围有限 , 但是构造简单、成本低廉;双锚点模式覆盖范围略大 , 但是成本也更高 , 可以复用UWB数字钥匙 。
单锚点模式与双锚点模式
4、计算量
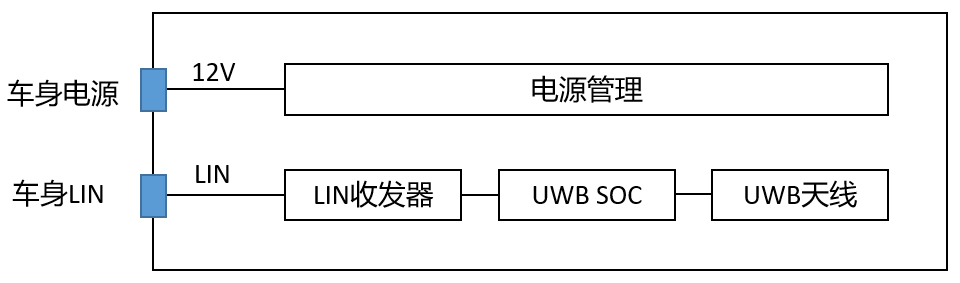
算法经过深度优化和精简 , 计算量可大为减少 , 便于集成到现有MCU中 。 全迹科技UWB单锚点雷达可以仅在1颗UWB SOC上直接实现完整雷达功能 , 以最大程度降低成本 。
雷达模组框图
UWB雷达的汽车应用1、活体检测
“将儿童单独留在停放的车内 , 即使只有几分钟 , 也可能导致中暑和死亡 , 尤其是当汽车暴露在阳光下时 。 儿童无法自行下车 , 再加上对高温的耐受性较低 , 因此要求儿童不得留在车内无人看管 。 温度可以在短短15分钟内达到临界水平 , 让窗户半开着几乎不能减少威胁 。 与车祸相比 , 儿童死于车辆相关中暑的情况较少发生 , 但这些完全可以避免的死亡的性质值得特别关注 , 因为解决车内儿童体温过高问题的技术已经存在 。 ”以上文字来自欧洲NCAP关于儿童存在检测的测试与评估标准的直接翻译 。
活体检测在汽车上主要用于儿童存在检测(CPD – Child Presence Detection) , 国外也有叫后排占用告警(ROA - Rear Occupant Alert)或Hot Car 。
欧洲NCAP计划从2023年1月起增加对车内儿童存在检测的评分 , 各项规定非常细致 。 美国正在立法要求所有新车预装儿童存在检测功能 , 预计在2025年全面实施 。 据说国内相关规范也在评估制订中 。
目前车内儿童存在检测的识别方式有直接与间接两大类 。 直接方式指的是通过尝试检测心跳、呼吸、运动、或其它生命指征来判定儿童是否存在;间接方式指的是通过一些逻辑信息来推断车内人员存在的可能性 , 信息包括:车门打开、压力感应、电容感应等 。
推荐阅读







- 神秘的孟加拉国,妓院村越来越流行,她们的未来在哪里?
- LPL选手直播都开始摆烂?虎明两人混时长引网友众怒,素质太差了
- “资本真贪婪!”家长老师抱怨网课平台开始收费,这合理吗?
- 34颗传感器受华为亲传,智驾领域的“天花板”,还得看阿维塔11?
- 荣耀80 Pro深度使用三天后,不吹不黑的,说说该机的优点和缺点
- 陕西浩公律师事务所 民商事研究院 | 公司法人能否就分公司与他人之诉提起第三人撤销之诉?
- 一百多公斤摩托车被老人损坏,向其监护人索赔竟避而不见
- 小米室外摄像机AW300:主动侦测,日夜守护
- 快船等不起伦纳德了!曝球队已经联系活塞,寻求交易优质3D锋线