文章图片
图1/6
来源:36氪 未来汽车Daily
文稿 | 孙桥 贾无敌
欢迎来到特斯拉AI Day!
Dojo超级计算机、全自动驾驶技术 , 以及one more thing——人形机器人Tesla Bot.
emmm , 有点东西....
有亮点 , 但不全都是亮点
一开场 , 特斯拉解释了诸多当前自动驾驶技术上的困境 , 让人看的感觉特斯拉自动驾驶要凉了一样 , 随即话锋一转 , 但是——“我造了一台全世界最最最最牛逼的计算机 , 所以上面这些都不是事 。 ”
据不完全统计 , 当前地球上在跑特斯拉数量超过140万辆 , 每个车身负载八个摄像头 , 每天这些拍摄画面都会被选取一部分送回数据库 。 那问题来了 , 特斯拉要这些画面做什么?特斯拉的数据库怎么能负载这么多的视频数据呢?
针对第一个问题 , 特斯拉今天的解释是 , 因为车载摄像不像激光雷达 , 能迅速建立起一个3D地图模型 , 它只能拍摄物体的某一侧 , 而这就是当前视觉系统的最大问题 。
但是 , 虽然我们一次拍不全 , 我们可以360°拍100次 。
嗯 , 真棒!真棒!
而第二个问题 , 每天140万辆车的视频数据要怎么处理呢?想到这 , 我轻轻抚摸了一下我已经烧到95°笔记本 , 还好 , 你不用受这种苦 。
早就被剧透的你们应该已经猜到了——那就是Dojo超级计算机 。
文章图片
图2/6
【36氪|马斯克:我摊牌了!自动驾驶的秘密被我找到了】在马斯克的规划中 , Dojo超级计算机在未来的算力要达到每秒钟exaFLOP的级别 , 也就是百亿亿次浮点运算 , 是现在的一万倍 , 按照2020年全球超算排名 , 特斯拉Dojo将超过目前的日本超算“富岳”登顶世界超算算力第一的宝座 。 (RAP GOD说唱加速)简单地说 , 这台超级计算机是特斯拉汽车突破自动驾驶技术的最后一块拼图 。
最后一个亮点则是特斯拉在今天发布的时速可达8KM/H的人形智能机器人 。 据官方介绍 , 这款机器人还可以与自动驾驶搭配使用 , 并学会人类驾驶员的操作习惯 。 硬要说缺点的话 , 只有一个 , 在美国这人均1米75身高的国家(National Center for Health数据) , 这机器人居然只有1米72?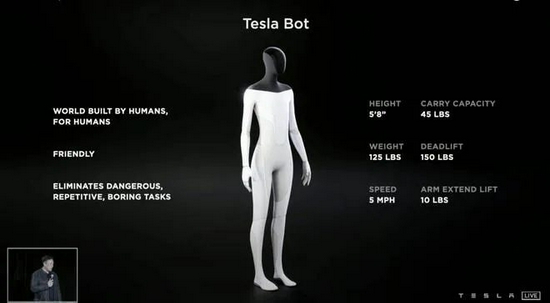
文章图片
图3/6
视觉+Dojo超算=地表最强?
不会造火箭的网红不是好工程师 。
众所周时 , 一直以来 , 马一龙并不只是想做一家造车公司 , 而是铁了心要将特斯拉变成一家科技公司 。 论对自动驾驶技术的专研 , 马一龙还是有点话语权的 。
早在2013年 , 马斯克就提出自动驾驶系统不仅可以用于飞机 , 还应该运用于汽车上 。 而特斯拉最早的自动驾驶系统是与Mobileye——一家视觉系统公司 , 合作开发的 。
文章图片
图4/6
这么算来 , 8年多的时间 , 马斯克是坚定不移的站视觉派 。
真是一个长情的男人——和我一样 。
说到这里 , 快速补充一个知识点 。
当前自动驾驶技术分为两大派系 , 以特斯拉为代表的视觉派和以小鹏为代表的激光雷达派 。 视觉派很好理解 , 就是通过大量的摄像头去捕捉周围环境 , 优点是真实又便宜 , 缺点是糟糕环境下能见度会比较低 , 图像捕捉范围也比较有限 。
但马一龙说了:“虽然我们拍不全 , 但我们拍的多呀 。 ”
而激光雷达则通过发射光波的反射来探测 , 通俗点说 , 激光雷达就像一个盲人周围360° , 有无数个自带量尺的拐杖敲击地面来识别障碍 。 优点是精度极高 , 但探测距离也会受到恶劣天气影响 ,
如今最大的缺点就一个字 , 贵!
难怪有不少人猜测 , 马斯克是为了节约造车成本才放弃激光雷达 。
对于这种传言 , 马一龙的解释是:多个雷达传感器的融合 , 有可能会干扰系统的判断 。
emmm , 你说是就是吧 。
文章图片
图5/6
但无论是视觉派的特斯拉是激光雷达派的小鹏 , 现阶段都没有真正研究出值得信赖的自动驾驶 。
问题关键不仅仅在于硬件 , 还在于软件层面的AI算力 。
这么看来 , 好像还是拥有Dojo超级计算机的马一龙更有胜算 。
但 , 还有一个新问题:什么样的自动驾驶才算是真正的自动驾驶?
自动驾驶是门糊弄学?
这两年有一个特别奇怪的现象 , 但凡是个新造车 , 都敢标榜自己家的自动驾驶技术 。
不知道的 , 还真以为现在的自动驾驶技术已经发展到可以让你躺着开车了 。
但现实情况是 , 就连钻研自动驾驶技术8年的特斯拉 , 也不过发展到了L2级而已 。
而目前市面上绝大多数智能汽车的自动驾驶级别也都是介于L2-L3之间 , 也就是双手还不能彻底脱离方向盘的阶段 。 但具体L1、L2、L3到底是什么意思呢?
这里又要补充一个并不算太冷的知识了:
目前的自动驾驶主要分为6个级别——L0/1/2/3/4/5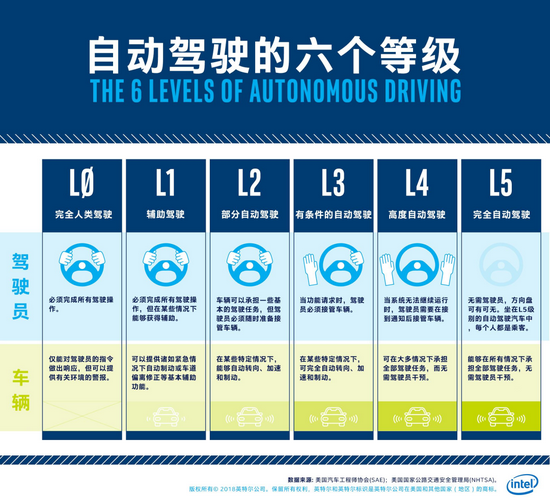
文章图片
图6/6
L0级别 , 四舍五入等于没有 , 就不多说了 。
L1和L2级别同被归类为“驾驶员辅助” , 帮了 , 但没有完全帮 。 相同点在于驾驶员需要对驾驶全程负责 , 区别在于使用场景 , 前者在紧急情况下 , 可以帮你实现自动跟车、加速、减速、刹车等非常基础的功能 。
而L2可以完成的操作就高级一点点 , 比如全速自适应巡航、自动泊车、主动车道保持、限速识别、自动变道等等 , 像拧个瓶盖这种单手无法操作的事情这时候就可以实现了 , 但一定要做好随时接管的准备 , 像边开车边刷视频这种分心的操作 , 劝你想都不要想 。
同时 , L2级别也是当前被运用最为广泛的智能车辆 。 比如 , 当前的热门车型特斯拉Model 3、Model S , 高配版小鹏P7、蔚来ES6、ES8等 。
而从L3级别开始就进入了一个全新阶段 , L3/4/5同被归类为“自动驾驶” 。 但他们又分别有着自己的名字——有条件的自动驾驶、高度自动驾驶和完全自动驾驶 。
快速概括一下:
L3相较于L2 , 使用场景更多 , 判断能力也更强 , 会根据路况环境判断是自动驾驶还是返回给驾驶员手动操作 , 并发出接管请求 。
L4和L3的最大区别就是 , 即便遭遇特殊情况 , 也是由系统自行处理 。 驾驶员仅需要在系统遭遇故障 , 无法运行时才需要介入 。
L5嘛 , 不用多说 , 光听名字就很牛了 , 车内打团开黑 , 指日可待 。
说这么多其实并没有指望大家全都记住 , 只是想给车主们提个醒 , 尽管车企为了营销 , 已经把关于自动驾驶级别的概念变得模糊 , 但至少我们作为购买者和使用者 , 我们得有意识的去研究 , 自己花钱买到手里的究竟是个什么样的产品 , 使用的上限又是什么 。
虽然这次Dojo超级计算机的出现似乎让完全自动驾驶离我们又近了一步 , 但至少现阶段 , 保守一点总不会错的 。
推荐阅读







- 星链|石豪:在太空,马斯克和美国当局是如何作恶的
- bug|这款小工具让你的Win10用上“Win11亚克力半透明菜单”
- 人物|马斯克承认输给了巴菲特:曾尝试挑战喜诗糖果,但最终放弃
- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- 最新消息|CES线下回归受阻:受奥密克戎肆虐影响
- the|美国人的“圣诞热情” 连奥密克戎也挡不住
- IT|为什么感染飙升但死亡人数有限?研究显示T细胞可防止奥密克戎引发重症
- 德尔塔|为什么感染飙升但死亡人数有限?研究显示T细胞可防止奥密克戎引发重症
- the|福奇:美国奥密克戎毒株疫情可能在1月底达到顶峰
- 车型|买车一定要有OTA?别克来告诉你答案