机器之心报道
机器之心编辑部
尽管是在人类的保护下 , 但双足机器人 Jet-HR2 的确短暂地飞了起来 。几年前, 来自广东工业大学的研究团队开发了一种双足机器人 Jet-HR1 。 该机器人通过嵌入脚部的小型涵道风扇在行走时改变重心来保持平衡 。 现在该研究团队将这种足部安装风扇的设计又做了进一步的改进 , 让第二代双足机器人 Jet-HR2 飞了起来 。
文章图片
作为一个具备飞行能力的机器人 , Jet-HR2 上装有 2 个控制器——偏航控制器和变桨控制器 。 该研究用实验展示了两种控制器的作用 。 首先 , 在没有偏航控制器的情况下飞行 , 机器人的飞行轨迹会显著偏移 , 甚至呈一定的旋转趋势 , 如下图所示:

文章图片
所有的试验都是用同样的姿势起飞的 。 为了防止机器人失去控制并掉下来 , 在机器人的腰部安装了两根碳管来抓住它 。 虽然飞得有点「慌乱」 , 但总归是飞起来了 。
其次 , 在没有变桨控制器的情况下 , 机器人会向前飞行 , 并有俯冲摔落的趋势:
【Jet-HR|飞起来的双足机器人:四个涵道风扇驱动,广东工业大学出品】

文章图片
最后 , 在变桨控制器和偏航控制器都就位的情况下 , Jet-HR2 完成了较好的上升飞行 , 稳定效果也不错:

文章图片
Jet-HR2 的实现原理

文章图片
论文链接:https://arxiv.org/pdf/2108.11557.pdf
Jet-HR2 机器人有 10 个关节 , 由无刷电机和用于运动的谐波驱动器驱动 。 为了克服小推力重量比条件下稳定姿态起飞的挑战 , 该研究基于推力矢量的概念设计了 Jet-HR2 。 它的推进系统由 4 个涵道风扇组成 , 其中 2 个固定在机器人腰部 , 另外 2 个安装在脚上 , 用于推力矢量控制 , 并通过在飞行过程中调整脚的姿态来控制推力矢量 。 此外 , 研究团队还针对起飞过程中质量误差和关节位置误差引起的姿态不稳定问题 , 提出了一种简化模型和控制策略 。
文章图片
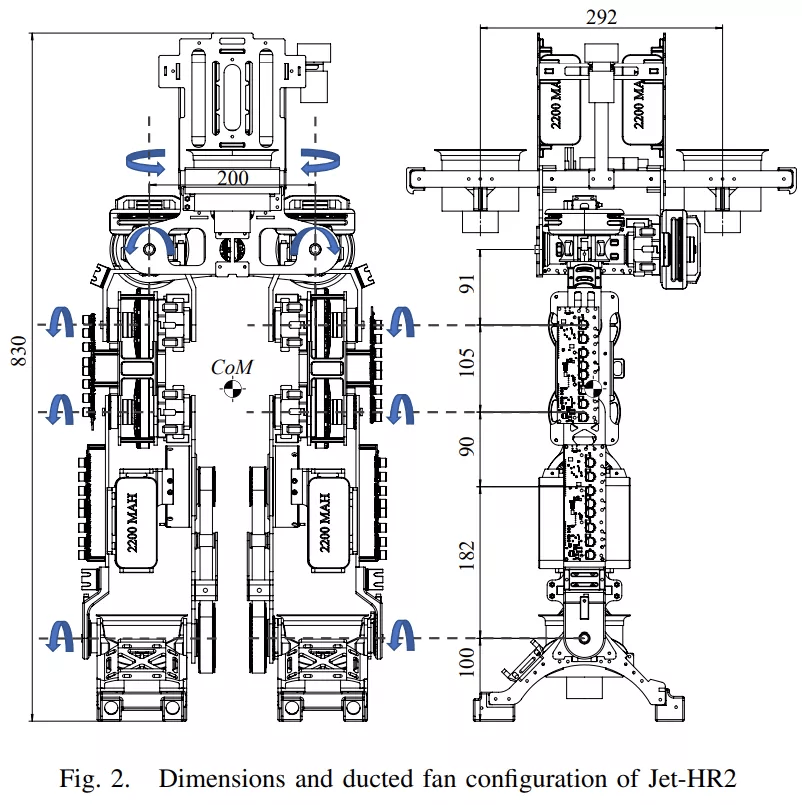
Jet-HR2 的尺寸和涵道风扇配置 。
实验结果表明 , 通过控制足部涵道风扇的推力矢量 , 可以有效抑制机器人起飞时的旋转和俯冲行为 。 每个风扇可以提供 5 公斤的推力 , 总共 20 公斤 , 因此足以举起 17 公斤重的机器人 。 但这里的推重比并不是很大 , 这就是控制的挑战所在:没有更多其他的动力 , 因此需要谨慎地分配推力 。
最终 , Jet-HR2 能够以 1.17(17kg/20kg)的推重比成功实现起飞 , 并保持稳定姿态(虽然不是完全受控) , 起飞高度超过 1000 毫米 。
文章图片
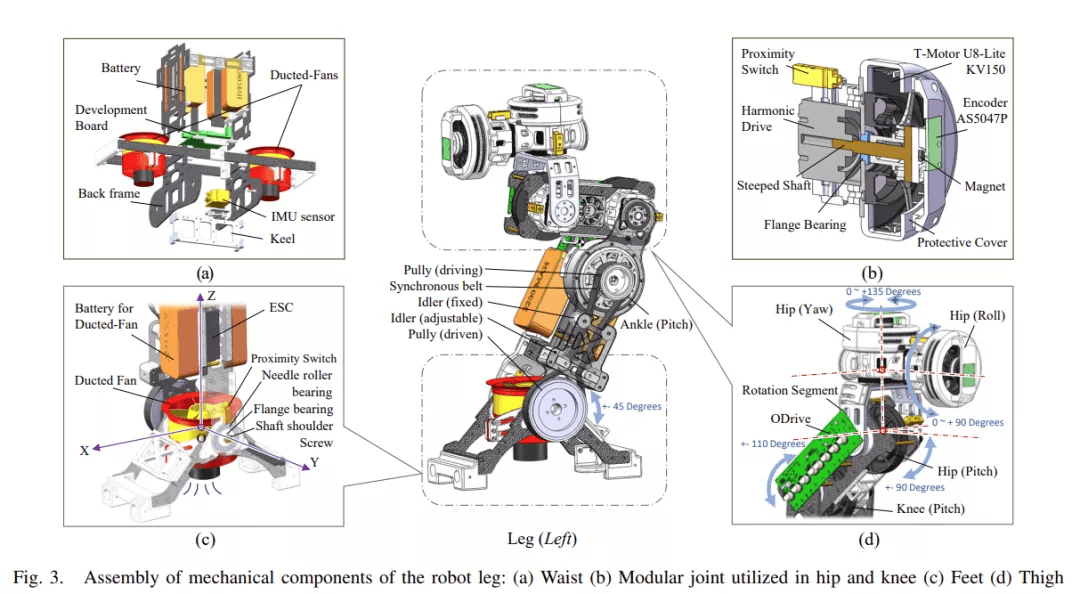
Jet-HR2 双足机器人的腿部部件 。
表面上 , 制造类人机器人并不是一件性价比很高的事情 , 但在某些层面 , 人形外观具备得天独厚的优势 。 正如论文作者所说:
近年来 , 各种用于灾难响应的人形机器人接连面世 , 通过专门的控制理论和其他机制来克服不平坦的地形 。 从传统上来说 , 类人机器人能够通过行进和攀爬克服这些障碍 , 但这些策略缺乏效率 , 尤其是在一些难以克服的障碍或地质断层等危险环境中 。 对于复杂现实场景中的紧急任务 , 人形机器人有望实现更多动态的空中技能 , 例如超过身长数倍的跳高、跳远、短距离飞行、悬停等 。
类人机器人的性能还达不到人类的水平 , 尤其是在重量增加的情况下 。 另一方面 , 即使达到人类水平 , 机器人在松散、易倒塌或悬崖状的地形上也可能显得无助 , 这似乎是使用纯关节致动器发力的限制 。 在这项研究中 , 研究者开发了一种可以使用涵道风扇推进系统飞行的新型人形机器人 , 以探索其在复杂环境中搜索和救援的潜在价值 。不难想象 , 一台可以飞行的人形机器人 , 将会有很多潜在的应用方向 。 这也等待着更多的研究者去探索 , 更多研究细节可参考论文原文 。
推荐阅读







- 原神|《原神》「飞彩镌流年」2.4 版本预下载已开启
- 飞腾|原生版微信登陆统信UOS应用商店,已适配X86/ARM/LoongArch架构
- 猎豹|数字化助力实体消费 机器人让商场“热”起来
- 相关|科大讯飞:虚拟人交互平台1.0在媒体等行业已形成标准产品和应用
- 技术|探秘AI智慧之旅,科大讯飞AI学习机研学游第一期圆满落幕
- 计算机|孟祥飞:用超算推动一个加速创新的中国
- 耳机|「以乐之名耀市而生」飞利浦Fidelio 降噪真无线耳机T1新品直播发布会圆满召开
- 编码|飞利浦发布 Fidelio T1 真无线降噪耳机:圈铁三单元,1699 元起
- 纪录片|看!花湖机场来飞机啦!
- 无人驾驶飞机|跑道下埋5万多个传感器、无人车导航