视觉传感器的信息承载量极高 , 目前远未被充分挖掘 , 但无论2D图像成像还是实时稠密3D建模都需要强有力的算法和算力进行支撑 , 这需要算法和算力进行协同设计 。 视觉传感器+算力+算法的传感器计算模式 , 将更加本质的推动解决自动驾驶当前面临的关键问题 , 即从2D和3D层面对物理世界进行事无巨细的感知与理解 。
鉴智机器人核心团队拥有超过十年的图像处理、AI算法和算力设计的行业经验 , 将以视觉传感器为核心 , 通过解决车载ISP、视觉雷达等视觉传感器2D、3D成像的核心问题 , 打造更加强大的自动驾驶之眼 , 从而推动自动驾驶安全等级的提升 。
1.1 从手机ISP到车载ISP
ISP(Image Signal Processor)是指通过一系列数字图像处理算法完成对数字图像的成像处理 。 在摄像机成像的整个环节中 , ISP负责接收感光元件的原始信号数据 , 可以理解为整个摄像机图像输出的第一步处理流程 。 ISP在提高图像质量、增强数据的一致性等方面有着极其关键的作用 。
得益于智能手机的发展和手机摄像头像素越来越高 , 手机ISP在过去几年得到了快速的发展和进步 , 手机拍照和录像的质量也越来越高 , 甚至到了惊艳的地步 。 比如在夜晚等场景 , 可以拍到比人眼看到的更清晰、光照更充足、色彩更丰富的照片;比如在进出隧道等光照变化剧烈的场景 , 也可以录制出比人眼表现更稳定、更清晰的视频 。 这些效果除了源于手机摄像头硬件上的升级 , 专门的AI ISP处理算法和处理芯片也起到了至关重要的作用 。
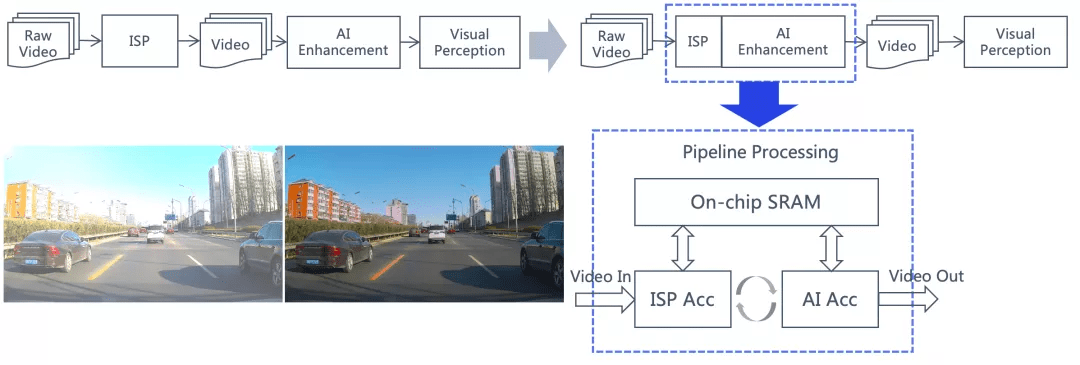
随着自动驾驶对车载成像质量的阶跃式提升需求 , 车载ISP , 特别是针对驾驶场景优化的AI ISP处理算法和处理芯片 , 将迎来爆发式的发展 。 AI在车载ISP整个流程中将变得越来越重要 , 特别是在降噪、去模糊、HDR等问题上 , 可以在夜晚、阳光直射、进出隧道等暗光、强光、高动态场景得到远超人眼的成像效果 , 同时最大程度上解决由Sensor引起的噪点、模糊等问题 。 将AI计算前置在ISP计算Pipeline中 , 通过流式计算 , 使得ISP的计算Pipeline不被打断 , 也将大大提升AI ISP的性能功耗比 。
鉴智机器人拥有全链路的芯片级ISP IP的设计能力 , 将解决ISP特别是AI ISP在车载场景的核心问题 , 让车载摄像头成像更清晰 , 从而进一步提高视觉雷达点云生成和图像语义感知等后续任务的准确性 。
文章图片
图1:鉴智机器人拥有全链路的ISP算法和算法硬核化设计能力
1.2 从2D感知到视觉雷达
面对大规模自动驾驶 , 对3D点云的信息稠密程度、场景泛化性、性能可扩展性方面提出了更高的要求 。 基于视觉雷达 , 通过双目或者多目立体视觉计算 , 产生实时稠密的3D点云是更优的方式 。
推荐阅读







- 影像|iQOO 9 系列预热:首发三星 GN5 传感器,150° 鱼眼超广角
- 智能化|龙净环保:智能型物料气力输送系统的研究及应用成果通过鉴定
- 手表|采用美信光学传感器,豪鹏科技电池,GARMIN佳明VENU2手表拆解报告
- 单孔|荣耀 Magic V 折叠屏手机通过 3C 认证,确认支持 66W 快充
- 视觉|超高色准打破行业天花板,创维S82还原真实世界
- 产品|数梦工场通过CMMI V2.0 L5评估,再获全球软件领域最高级别认证加冕
- Apple|新专利显示 苹果计划用光学传感器取代手表的数码表冠
- 无人驾驶飞机|跑道下埋5万多个传感器、无人车导航
- 大脑|ALS患者首次通过脑机接口发推
- 无人驾驶飞机|跑道下埋5万多个传感器、无人车导航——鄂州花湖机场有多“智慧”?