不过 , 同样是绕着地球转 , 不同的轨道高度 , 飞船的速度是不同的 。 飞船前往空间站进行交会对接 , 就会有许多不同的情况 。 最常见的是V向对接 , 说白了就是两个航天器处于同一个轨道高度 , 一个在前一个在后 , 然后后面的这个追上前面的 , 实现对接 。
对应到飞船和空间站就是 , 空间站绕着轨道转 , 飞船逐渐飞到空间站的轨道上 , 然后追上空间站 , 和空间站交会对接 。 整个过程一般需要6个小时 , 飞船全程要飞20万公里的路程 。 要知道 , 空间是三维的 , 有上下左右前后六个维度 , 这个技术只需要保证在前后方向上速度几乎一致时对接即可 , 这好比就是一个“追及问题” 。 因此 , 技术上要相对简单一些 , 也最常用 。 神舟十二号在发射时 , 也采用了这个技术 。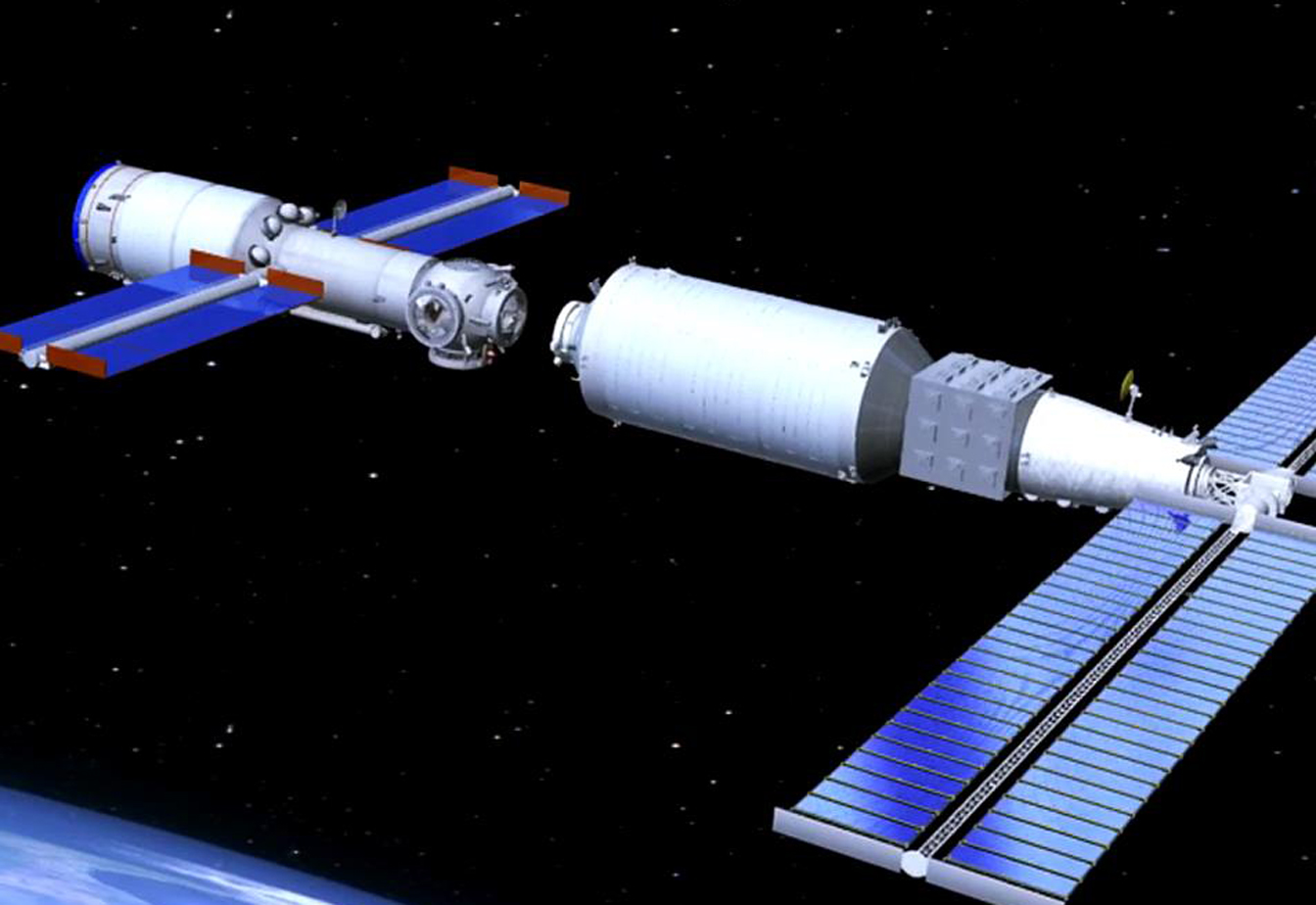
Z向对接和V向对接不同的是 , 飞船和空间站不是头尾相接 , 而是飞船追上空间站后 , 飞到空间站的左右两侧来进行交会对接 。
不过 , 这次神舟十三号使用的是:径向对接 。 径向对接说白了径向对接是一个在上面 , 一个在下面 , 然后上下方向上逐渐交会对接 , 那这个技术难在哪里呢?
和V向对接不同 , 飞船并不会直接飞到和空间站一样的轨道高度上 。 飞船的轨道高度要低于空间站的轨道 , 然后逐渐飞到空间站下方 , 然后和空间站保持相对静止的运动状态 , 在这样的情况下 , 逐渐上升和空间站进行对接 。 这听起来好像不太难?
实际上 , 要实现这个技术非常难 。 要知道 , 空间站是在高速运动 , 空间站最新的速度数据是7.68千米/秒 , 神舟十三号飞到空间站下方后 , 要与它保持相对静止是很难的 , 因为轨道不同 , 所需要保持的速度就是不同的 。 这就好比是两个人在弯道上赛跑 , 还要一直保持在同一个水平线上 , 要知道两个人跑步的速度大概只有在10米/秒的量级 , 而两个航天器的速度要比人跑步快700多倍 , 还要保持相对静止就非常难了 。
但这还不是最难的 , 在保持相对静止的同时 , 飞船还要逐渐调整自己的轨道高度 , 去和空间站对接 , 每次轨道高度的些许变化 , 速度都要做出相应调整 。
推荐阅读







- 区块|面向2030:影响数据存储产业的十大应用(下):新兴应用
- 地面|全程回顾神舟十三号航天员乘组圆满完成第二次出舱任务
- 植被|二十年后的成都
- 硬件|日本要在十年内量产2nm?
- 末端|菜鸟发布2022物流科技十大趋势报告
- 器件|6G、量子计算、元宇宙…上海市“十四五”聚焦这些前沿领域
- Top10|2021最受年轻人关注的十大人物
- 领域|上海市电子信息产业“十四五”规划:以集成电路为核心先导
- 前瞻|6G、量子计算、元宇宙……上海市“十四五”聚焦这些前沿新兴领域
- 建设|数据赋能业务,数梦工场助力湖北省智慧应急“十四五”开局