文章图片
基于超疏水特性的仿水黾微型机器人示意图 。沈阳自动化所供图
中新网沈阳9月10日电 (采访人员 王景巍)自然界中许多昆虫都具有独特的材料特性及优异的运动性能 , 如昆虫体表往往具有超疏水特性 , 能快速在水面滑行、跳跃;具有轻薄的折叠翼、灵敏的复眼;能爬行、能钻土、能游泳、能飞翔等 。 如何模仿昆虫研制出功能新颖、多样的微型机器人 , 揭示微观尺度下新的现象和规律并服务于人类 , 一直是科学家们思考和面对的问题 。
【红外光|沈阳自动化所研发红外光与磁场联合驱动的仿水黾微型机器人】中科院沈阳自动化所9月10日发布消息 , 近日 , 该所在微型机器人领域取得新进展 , 研究的仿水黾微型机器人可在红外光与磁场的联合驱动下实现可编程多模态运动 , 在微型机器人联合驱动、微流控输运、环境监测治理等方面具有重要作用 。
文章图片
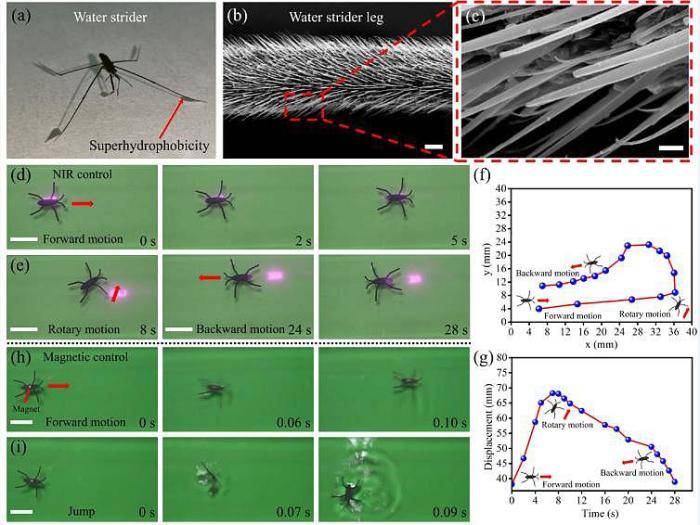
红外激光和磁场联合驱动的仿水黾微型机器人在水面游动、跳跃及翻滚 。沈阳自动化所供图
沈阳自动化所微纳米课题组的科研人员从自然界中的水黾获得灵感 , 开展了超疏水材料制备及机器人多场联合驱动的研究 。 结合聚二甲基硅氧烷(PDMS)、石墨烯、磁性颗粒制备了具有光相应、磁响应及超疏水特性的复合材料 , 加工出了仿水黾微型机器人 。
机器人结合微型机器人的光敏特性 , 利用红外激光实现了微型机器人在水面的可控运动 。 基于磁驱动技术与材料的超疏水特性 , 实现了微型机器人在水面的快速游动、跳跃及翻滚动作 。 该研究实现了新材料制备与多场驱动技术的融合 , 为仿昆虫机器人的研究提供了新的思路 。
该研究得到了国家自然科学基金、科技部重点研发计划、中国科学院国际合作重点项目和交叉创新团队等项目的支持 。 研究成果已发表在《化学工程期刊》(Chemical Engineering Journal) 。 (完)
推荐阅读







- 产品|泰晶科技与紫光展锐联合实验室揭牌
- 手机|一加10 Pro宣传视频曝光:将于1月11日14点发布
- 样儿|从太空看地球新年灯光秀啥样儿?快看!绝美风云卫星图来了
- 最新消息|世界单体容量最大漂浮式光伏电站在德州并网发电
- 新机|快准稳,捕捉每个高光瞬间! 刘衡分享EOS R5拍摄体验
- 技术|聚光科技旗下临床质谱仪获批医疗器械注册证
- 识别|沈阳地铁重大变化!能摘口罩吗?
- Disney|光明日报评迪士尼凌晨数千人排队抢购玩偶:道理何在?
- 手表|采用美信光学传感器,豪鹏科技电池,GARMIN佳明VENU2手表拆解报告
- 警告!|华为联想卷入滴滴高管千万受贿案 判决书曝光浪潮曾向其输送720多万