选自Construction Physics
作者:Brian Potter
机器之心编译
机器之心编辑部
为了让机器帮人盖房子 , 人们已经努力了 100 多年 , 但时至今日 , 「机器泥瓦匠」依然没有大规模商用 。 这究竟是什么原因?在研究建筑问题时 , 你会发现其实所有的「新」想法早就被尝试过不止一次了 , 甚至可以追溯到几十年前 。 让机器帮忙砌墙就是其中之一 。
毋庸置疑 , 这个想法非常具有吸引力 , 因为砖石结构真的太适合机械化了 。 它是一项重复性劳动 , 建造一栋砖石建筑需要砌成千上万块砖 , 每块砖几乎都是一样的 , 砌在一起的方式也一样 。 这一过程似乎不需要多么复杂的身体动作:每块砖都涂上一层灰浆 , 然后放在另一块砖的旁边 。 由于每一块砖和灰浆的接缝都是相同的尺寸 , 砖块的放置也几乎是确定的 。
最重要的是 , 砌墙是最繁重的建筑劳动之一 , 需要工人连续工作数个小时 , 不停地移动重物 。
从这些角度来看 , 这个任务似乎天生就应该用机器来完成 。 而人们也已经为此努力了 100 多年 。
早期尝试
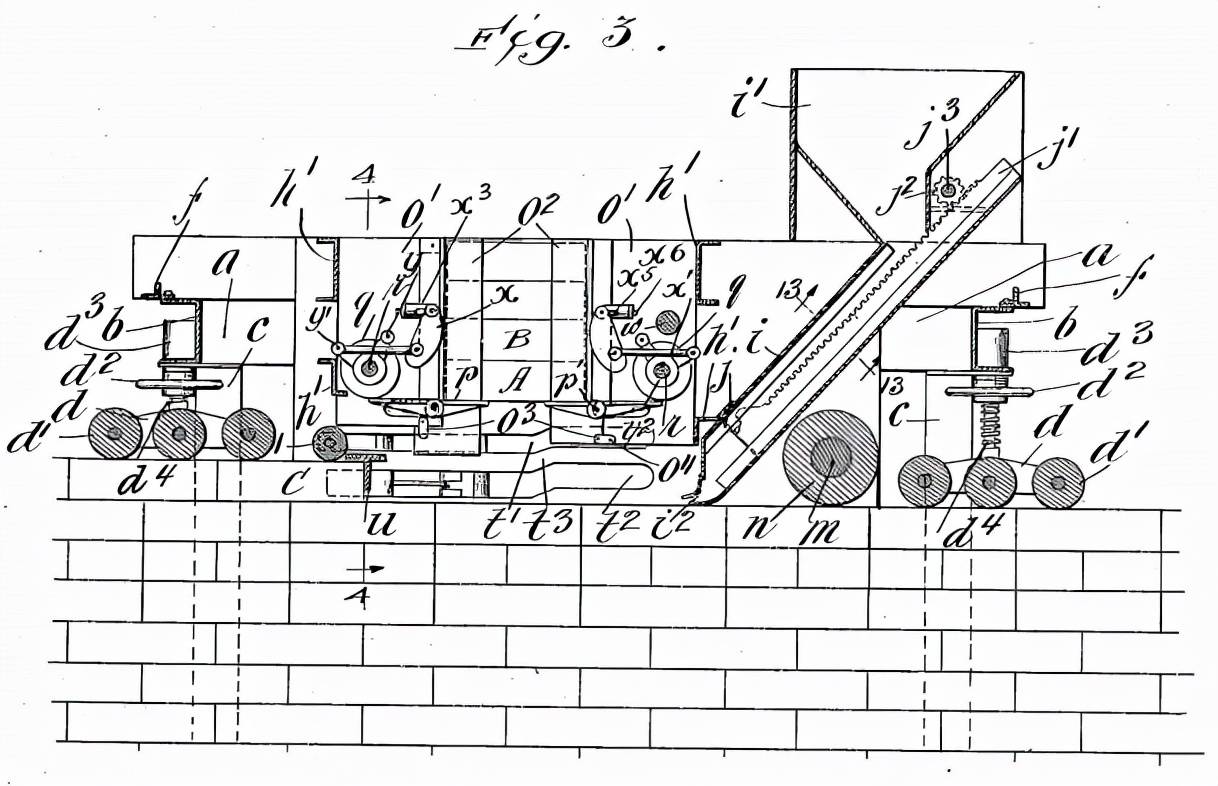
用机器砌墙的首次尝试可以追溯到 19 世纪末、20 世纪初 , 1899、1904、1924 年都有相关专利可以查到 , 而且申请人都不是同一个人 。 这些机器理论上应该沿着墙移动 , 然后一边抹灰浆一边往上放砖块 。 但是 , 它们无法感知周围的环境 , 也无法测量放砖的位置 , 而是机械地挤出一层灰浆 , 并机械地按照一定距离放好砖 。
John Thompson 1904 年的砌砖机 。
文章图片
很难查清楚这些发明有多少真的造了出来 , 但一位叫 John Knight 的发明家不仅将机器造了出来 , 还砌了堵墙并屹立至今 。

文章图片
在接下来的几十年里 , 同样的概念出现了好多次 。 其中 , 六七十年代那些发明还可以查到专利 , 下面两张图展示了 20 世纪 60 年代的砌墙机 Motor Mason , 看起来和 20 世纪初的没多大区别 。 这些机器基本也只停留在 demo 阶段 , 没有走向商用 。
文章图片
文章图片
20 世纪 80、90 年代
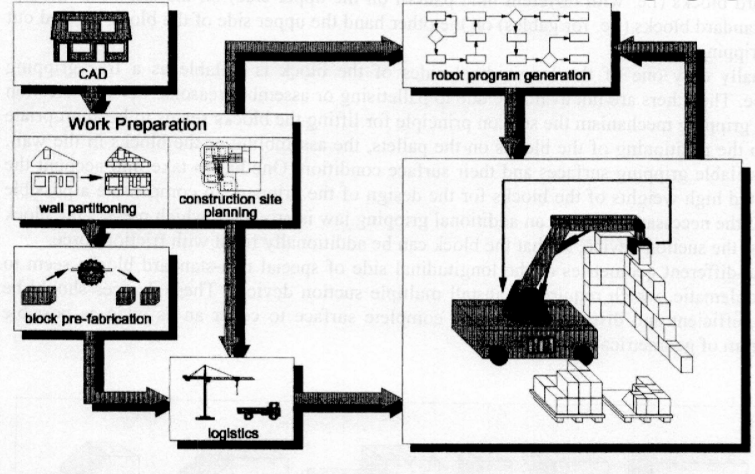
20 世纪 80 年代末到 90 年代初 , 人们对砌墙机械化的尝试转向了机械臂 。 与之前纯机械的砌墙机器不同 , 这些机械臂拥有一个信息处理组件 。 因此 , 它们并不是一直重复一个动作 , 而是将具有高自由度的机械臂与传感器和控制系统结合到一起 , 以「看到」砖块并确定放置位置 , 然后把砖抓起来放上去 。
有段时间 , 这一方向成为了学术圈一个完整的子领域 , 可以查到的成果包括 1988 年的 Slocum、1989 年的 Lehiten、1996 年的 Rihani、1993 年的 Altobelli、1996 年的 Pritschow、以及 SMAS、ROCCO 等系统 。
ROCCO 系统示意图 。
文章图片
但即使投入了这么多力量 , 得到的结果也没有多成功 。 多数机器都没有达到纸面上所描述的水平 , 只有少数几个达到了原型机水平 。 有位研究者甚至宣称 , 在可预见的未来 , 通用建筑机器人是不可能实现的 。 不过 , 可用于生产的例子倒也不是没有 , 一个名为 Multistone 8000 的系统就可以在类似工厂的环境中砌墙 , 但也需要人类帮助 。
当前的尝试
近些年来 , 砌墙作为一种建筑技术在发达国家的重要性已经下降 , 人们的兴趣已经转向自动化 。 这里说的并不是 3D 打印 , 而是其他几十种技术探索 。
其中最先进的是 Fastbrick Robotics 公司建造的 Hadrian 系统 。 Hadrian 通过一个安装在卡车上的空心吊杆来运输砌块(有点像混凝土泵车) 。 当砖块接触到吊杆末端时 , 它会被喷上工业粘合剂(而不是传统的砂浆) 。 然后机械臂抓住它 , 把它放到正确的位置 。

文章图片
这个吊杆覆盖的范围是如此之广 , 而且底座还有一辆车可以控制移动 。 如此一来 , Hadrian 所受的限制比它的前辈们都要少 。 它可以在狭窄的走廊或复杂的角落放置砖块 , 只需要移动几次就可以建成一个小建筑的所有墙壁 。 Hadrian 目前每小时可以砌 200 块砖 , 但 FBR 的目标是 1000 块以上 。
Hadrian 的开发工作 2006 年就开始了 , 但直到最近才开始在商业工地上使用 。 截至目前 , 他们已经在澳大利亚建造了 3 到 4 栋建筑 。
但这家公司似乎遇到了一些困难(对于一个已经开发了超过 15 年的硬件系统来说 , 这并不奇怪) , 2020 年进行了一次大规模裁员 , 最近几个月使用该系统建造的建筑也开始减少 。
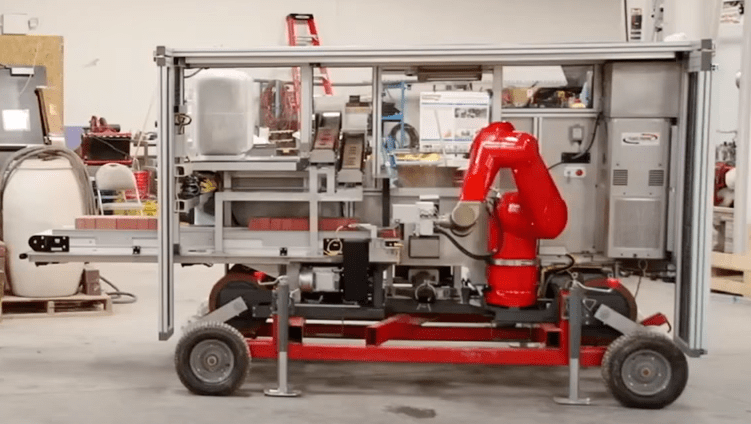
相比之下 , Construction Robotics 开发的 SAM 半自动砌砖机在商业化上要更成功一些 , 自 2015 年以来一直在商业项目中使用 。 SAM 由机械臂、砂浆分配器和传送带组成 , 还有一个轮式底盘 。
SAM 工作时 , 机械臂抓起一块砖 , 在上面涂上一层灰浆 , 然后根据系统内置的图纸将其放置在墙上的某个位置 。 一旦砖块就位 , 它就会重复这个过程 , 在砌墙的过程中来回移动(墙两端的工作需要泥瓦匠来完成) 。 SAM 有一系列的传感器来适应平台的移动 , 并确保它放置砖块的水平 。 此外 , 它还能适应各种大小的砖块 。 它被安装在一个可移动脚手架上 , 脚手架随着墙不断升高 。
文章图片

文章图片
和 Hadrian 一样 ,SAM 似乎也遇到了一些困难 。 它在较长的墙体上表现出色 , 但在较短的墙体上比不过人类泥瓦匠 。 它的干活速度最高比人快 4 倍 , 但它不能转弯 , 不会抹灰缝 , 不能干太技术的活儿 , 需要有人在一边配合 。 有本名为「SAM: One Robot, a Dozen Engineers, and the Race to Revolutionize the Way We Build」的书记录了 SAM 开发过程中面临的各种挑战 , 以及开发者苦苦为其寻找买家的故事 。 Construction Robotics 网页上的宣传资料表明 , SAM 已经不是他们的主打产品了 , 他们现在更关注的是其他产品 , 比如后面会讲到的 MULE 。
除了 SAM 和 Hadrian , 还有其他一些「机器泥瓦匠」正处在不同的开发阶段 。 不过 , 与这些专注于砌墙的机器相比 , 铺路机器似乎更容易成功 , 很多公司都已经开始提供这种「打印」砖路的服务 。

文章图片
泥瓦匠助手
除了上面提到的各种砌砖机器 , 其实还有一类机器是专门用来减轻泥瓦匠压力的 , 可以被称为泥瓦匠助手 。 它们的作用通常是帮人拿起砖块 , 至于放哪儿、怎么放就交给人类泥瓦匠来决定 。
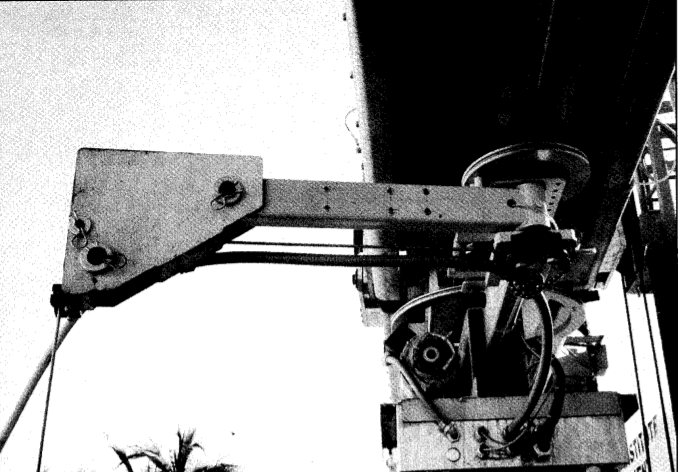
这种泥瓦匠助手至少可以追溯到 1994 年美国军方用来做试验的 MAMA(Mechatronically Assisted Mason’s Aid)系统 。 它由一个附在轨道上的吊杆臂上的夹持器组成 。 泥瓦匠可以利用夹持器将砖块移到合适的位置 , 而不用自己亲自拿 。
文章图片
从那时起 , 其他公司也开始陆续开发类似的装置 , 比如 Layher Balance、Rimatem、Assistance System Steinherr 等 。 上面提到的 MULE 也是其中之一 。
Layher Balancer 。

文章图片

文章图片
Construction Robotics 开发的 MULE 在解放人力方面的效果 。

文章图片
这些砌墙辅助系统中最有趣的可能是 FRACO 正在开发的外骨骼 , 去年刚刚发布 。 它源自为军队开发的模型 , 并具有各种被动和主动提拉机构 , 旨在减少操作砌砖时泥瓦匠的肌肉压力 。
FRACO 外骨骼 。

文章图片
当然 , 帮助搬运重物的机器并不完全是革命性的 。 一位农业生产力文章的评论者指出 , 砌砖生产力最重要的进步之一是伸缩式搬运机 , 它消除了手动移动砖石托盘的必要性 。
为什么「机器泥瓦匠」还没大规模实现?
砌墙本应是机械化的首选 , 但百年来有限的成功表明 , 某些方面还存在一些阻碍 。 这使它成为了一个有趣的研究案例 , 因为它有助于人们去准确定义机械化的困难之处 。 为什么砌墙和砸钉子如此不同?后者几乎完全实现了机械化 , 但前者几乎都是手动?
【移动|让机器帮人砌堵墙怎么那么难?这是人类的百年奋斗史】影响因素可能有以下几个:一是砖块并非简单地放在固体表面 , 而是放在一层薄薄的砂浆上 , 砂浆是水、沙子和水泥材料的混合物 , 非牛顿流体会具备某种复杂的物理特性 , 当它移动或晃动时 , 粘度会增加 。 这导致很难以纯粹机械化的、确定性的方式去使用它 , 而且砂浆是一种现用现混合的材料 , 每一批次之间的性能都会有所不同 。
砌砖机器一直在与砂浆作斗争 。 上世纪 80 年代末、90 年代初的学术研究通常基于干砌墙 , 这是一种不需要灰浆接缝的墙体 , 或者基于表现更可预测的灰浆替代品 。 Pritschow 曾在 1996 年的论文中直言:砂浆问题太难解决了 。 已经想出如何用机器涂抹好砂浆的人仍然不能完全生产出干净的砂浆接缝 , 它们只是在那里涂抹 , 还需要工人跟在后面清理 。 在某些方面 , SAM 的努力与 50 岁的 Motor Mason 没有什么不同 。
砂浆接缝让设置砖块变得更复杂了 , 而钉枪可以对钉子施加力并且每次都获得相当均匀的结果 。 即使不均匀也不影响什么 , 就算钉子略微歪斜 , 也仍然能起到该起的作用 。 在一层非牛顿流体上码一个砖块不是那么容易 , 如果没有来自环境中的其他反馈 , 就很难确定墙体是水平建造的 。 人类泥瓦匠会不断地用绳子或场地水平测试装置来确保墙体保持笔直 , 并根据需要进行微调 。 机械泥瓦匠也需要以某种方式来做同样的事情 , SAM 似乎已经基本解决了这个问题 , 但仍然时常需要后面的工人来拍一下 。
根据环境反馈进行调整的必要 , 这就是砸钉子与砌砖的不同之处 。 钉枪、圆锯和其他电动工具在某种意义上更像是砌砖助手 , 它们在执行一些纯粹的体力任务 , 同时将所有信息处理和精确工作交给人类 。 钉枪不负责确定钉子需要去哪里 , 只是将自身移动到位 , 它只是完成敲钉子的物理任务 。
路由器和铣床的历史可以提供一个具有启发性的平行关系 。 前者是在 19 世纪末 / 20 世纪初开发的 , 而程序控制能力是在 40 年代末 / 50 年代初开发的 。 但直到最近 , 我们才有能力整合实时反馈 , 从而支持 Shaper Origin(一种自动纠正人体动作的手持路由器)等产品 。 让机器根据周围环境做出强有力的反应仍然是一个复杂的问题 , 即使机器在物理上有能力做到这一点 , 也依然如此 。
Shaper Origin, 世界上第一台手持式 CNC 设备 。

文章图片
还有一些其他问题 , 也让砌砖机器变得棘手:
- 砖块又大又重 , 这意味着需要更大、更昂贵的机械来操纵它们(特别是如果想快速地操纵它们 , 因为力会随着加速度成比例);
- 在美国 , 砖石墙是用大量钢筋建造的 , 这对于简单的基于砖块的机器来说很难处理(在 Hadrian 的项目中 , 钢筋是手动安装的);
- 出于规避风险的原因 , 很难让承包商接受相关技术 。
这是一个很难回答的问题 。 从根本上说 , 这似乎取决于机器人、软件、计算机视觉和其他技术(统称为「自动化」)的进展情况 。
尽管困难重重 , 但砌砖还是比其他建筑系统更成功地实现了自动化 , 也是为数不多的商用机器人在市场中能广泛使用的系统之一 。 因此 , 自动化技术的进步可能最适用于砖石建筑 。 如果自动化砌筑系统变得更小、更快 , 可以更轻松地处理角落和完成接缝 , 它可能会开始变成一个非常有吸引力的系统 。
这也很容易一石激起千层浪 。 先进的自动化技术也可以很容易地应用于其他建筑系统(木材、钢铁等 。 )
砖块非常重 , 这意味着操纵它们的机器总是比操纵更轻的建筑系统的机器更昂贵 。 甚至大型街区也只占整个建筑的一小部分 。 因此 , 与其他建筑类型相比 , 自动化砌砖系统最终可能会更昂贵且生产率更低 。 我们可以看到这样一种情况 , 即自动化砌砖在很短的时间内变得具有竞争力 , 但随着该技术适用于其他建筑系统 , 很快就会黯然失色 。
原文链接:https://constructionphysics.substack.com/p/where-are-the-robotic-bricklayers
推荐阅读







- 代码|GGV纪源资本连投三轮,这家无代码公司想让运营流程变简单
- 智能化|适老化服务让银行更有温度
- bug|这款小工具让你的Win10用上“Win11亚克力半透明菜单”
- 软件和应用|AcrylicMenus:让Windows 10右键菜单获得半透明效果
- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- ASUS|ROG Maximus Z690 APEX DDR5主板实测 转接卡让DDR4内存顺利点亮
- 硬件|Yukai推Amagami Ham Ham机器人:可模拟宠物咬指尖
- 山西|移动5G+智慧成果亮相山西数字化转型大会
- Insight|太卷了!太不容易了!
- 王者|布局手术机器人赛道,谁是王者? | A股2022投资策略⑩