8月20日14时33分 , 经过约6小时的出舱活动 , 神舟十二号航天员乘组密切协同 , 圆满完成出舱活动期间全部既定任务 。
此次出舱活动 , 航天员聂海胜、航天员刘伯明出舱 , 汤洪波在舱内协同配合出舱操作 , 先后完成了舱外扩展泵组安装、全景相机D抬升、舱外设施组装等任务 , 全过程顺利圆满 , 进一步检验了我国新一代舱外航天服的功能性能 , 检验了航天员与机械臂协同工作的能力及出舱活动相关支持设备的可靠性与安全性 。
这次出舱活动有很多震撼的画面 , 想必大家对聂海胜和刘伯明互拍的画面印象深刻 , 刘伯明几乎“挂”在空间站上 , 聂海胜则“站在机械臂上” , 背景是蓝色的地球 , 蔚为壮观 。
此次出舱任务 , 机械臂将航天员从核心舱的前部节点舱接上送到核心舱的后部资源舱进行作业 , 然后再返回前部节点舱 , 总的路程较第一次出舱任务要远很多 , 任务时间也更长 。
航天员出舱活动经常离不开机械臂的支持 , 而且机械臂在飞行器捕获等方面也有发挥重要作用 , 被誉为“太空巧手” 。 那么 , 中国空间机械臂的水平如何?

文章图片
聂海胜则“站在机械臂上” , 背景是蓝色的地球 , 蔚为壮观 。
不可或缺的“太空巧手”
随着人类探索太空脚步的不断向前迈进 , 各种各样的航天飞行器发射进入太空执行任务 。 在各种空间活动中 , 诸如空间飞行器的自主交会对接、空间碎片清除、深空探测等 , 通常需要一种具有精确操作能力和视觉识别能力的空间机构来辅助完成 , 在这种情况下 , 空间机械臂技术应运而生 。
空间机械臂是一个机、电、热、控一体化高度集成的空间机电系统 , 其本身实际上是一个智能机器人 。 根据安装位置不同 , 空间机械臂分为舱内和舱外两大类 , 舱内机械臂因为受舱内空间的限制 , 尺寸和运动范围都受到了制约 , 主要的用途是舱内组件的装配、零部件的更换、对漂浮物体的抓取 , 空间科学试验等 。 舱外机械臂针对不同任务而设计 , 长度从几米到十几米不等 , 可以辅助空间飞行器完成交会对接、对空间目标的捕获释放、在轨服务、空间观测等任务 。
上世纪70年代 , 美国就开始探索机械臂等机器人系统应用于航天领域 , 用于替代航天员在恶劣的太空环境中完成在轨组装、维修和回收空间设备的任务 。
世界上第一套空间机械臂系统由加拿大Spar公司于1981年设计研制 , 名为 Canadarm1 , 安装在美国航天飞机上 。 该机械臂长约15米 , 重410千克 , 有6个可控关节 , 其上安装有相机系统来观察机械臂的工作状态 , 协助末端执行器完成操作任务 。 Canadarm1机械臂最大负约30吨 , 参与了空间飞行器的维护和空间站的组装等工作 。
文章图片
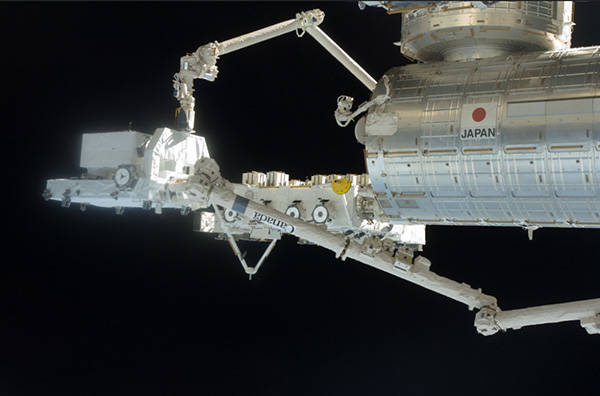
国际空间站上的机械臂 。
后面 , 加拿大又研发了多套空间机械臂 , 其中 , 最著名的机械臂就是为国际空间站研制的Canadarm2 。 该机械臂长17.6米 , 有7个自由度 , 总重1.8吨 , 最大负荷超过116吨 , 可以自我重定位 , 具备舱体表面爬行功能(但只能在美国舱段上爬行 , 因为有些其他国家舱段没有供机械臂爬行的点位) 。 这里要提一下的是7个自由度活动能力 , 这是一种仿生的设计 , 因为我们人从肩到手就是有7个自由度 , 非常灵活 。
空间站的机械臂可以帮助航天器停靠国际空间站 , 支持航天员出舱活动 , 完成太空试验以及空间站的建设、维护等 , 加拿大航天局也因此获得了国际空间站3%的使用权 。 除了加拿大的机械臂 , 其实国际空间站还有日本和欧空局的机械臂 , 但尺寸比加拿大的小 , 加上日本和欧空局的舱段少 , 知名度远小于加拿大的机械臂 。 欧空局的机械臂(ERA)今年7月随俄罗斯的“科学”号实验舱一同升空 , 该机械臂长11米 , 重630千克 , 有7个自由度 , 也具备舱体表面爬行功能 。
文章图片
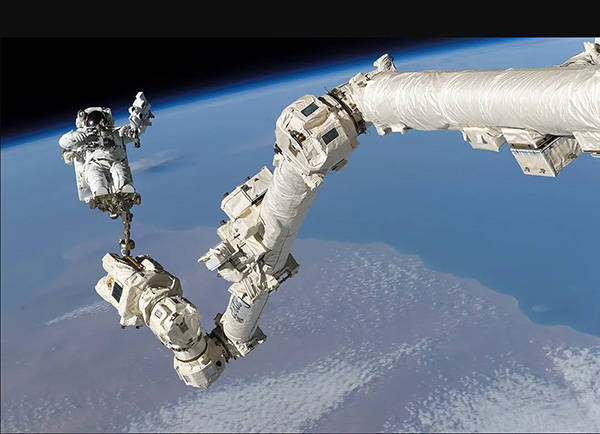
这是一张经典照片 , 航天员站在国际空间站机械臂上进行出舱活动 。
日本很早就开始研制空间机械臂 , 于1997年成功发射了ETS-7工程试验卫星 , ETS-7由一颗追踪星和一颗目标星组成 , 验证了交会对接和空间机器人技术 。 其机械臂具有6个自由度 , 配有摄像机和辅助工具 , 末端安装有三指灵巧机器手系统 。 它首次进行了无人情况下的自主交会对接和舱外空间机器人遥操作试验 , 演示了多自由度、多传感器机械手用于空间精密在轨服务的能力 。
写到这里可能有一些人会问 , 作为世界上航天科技实力最强的美国怎么没有研制机械臂 , 其实 , 美国在这一领域也处于世界领先水平 , 只是美国与这些盟国关系很好 , 有些项目也可以给其他国家做 , 没必要大包大揽 。 美国马里兰大学从1992年起开始了“漫游者”空间机械臂的设计与研究 , 1996年完成了遥控机械臂实验 。 2007年 , 美国国防高级研究计划局的“轨道快车”项目搭乘宇宙神-5火箭发射升空 。 卫星装备了高度自动化的机械臂 , 在试验中 , 机械臂反复地从一颗卫星传递部件到另一个卫星上 , 以验证其功能、可操作性和可重复性 , 初步具备了替代航天员在太空完成维修作业的能力 。
尽管取得了不错的成绩 , 加拿大航天局并没有坐吃老本 , 后面又开始研制第三代空间机械臂——Canadarm3 , 其比前一代机械臂更加灵活和紧凑 , 机械臂长15米 , 拥有6个自由度和高级软硬件结构 。 据悉 , Canadarm3将用于美国的“门户”深空空间站 , 支持美国“阿尔忒弥斯”载人登月计划 , 主要负责航天器的抓取和释放 , 支持航天员出舱活动等 。

文章图片
国际空间站的机械臂捕获“龙”货运飞船 。
世界领先水平的中国机械臂
中国空间站核心舱上的空间站机械臂是我国目前智能程度最高、规模与技术难度最大、系统最复杂的空间智能制造系统 。
中国载人航天工程总设计师周建平此前介绍称 , 机械臂的作用在于空间站组装建造、维护维修、辅助航天员出舱活动等任务 , “是中国空间站在轨建造能力水平的重要标志” 。

文章图片
根据官方公布的信息 , 该机械臂平时安装在核心舱的小柱段上 , 主体结构是两根臂杆 , 展开长度10.2米 , 重约700千克 , 其肩部设置了3个关节、肘部设置了1个关节、腕部设置了3个关节 , 每个关节对应1个自由度 , 具有7个自由度 。 通过各个关节的旋转 , 空间站核心舱机械臂能够实现自身前后左右任意角度与位置的抓取和操作 , 为航天员顺利开展出舱任务提供强有力的保证 。

文章图片
珠海航展上展示的核心舱和机械臂 。
为扩大任务触及范围 , 该机械臂还具备爬行功能 。 由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案 , 肩部和腕部关节配置相同 , 意味着机械臂两端活动功能是一样的 。 机械臂通过末端执行器与目标适配器对接与分离 , 同时配合各关节的联合运动 , 从而实现在舱体上的爬行转移 。

文章图片
除了支持航天员出舱活动外 , 机械臂在后续任务中还将承担舱段转位、悬停飞行器捕获和辅助对接、舱外货物搬运、空间环境试验平台照料等重要任务 。 该机械臂还可以从10米扩展到15米 , 把小臂和大臂组合在一起 , 形成一个更长的组合臂 。 机械臂设计寿命15年、负载能力25吨、末端定位精度45毫米 , 可实现大范围、大负载操作以及局部精细化操作 。 此外 , 机械臂以后还可以扩展到实验舱Ⅰ、实验舱Ⅱ , 还有光学舱 , 这些舱都可以进行舱外机械臂支持航天员开展的一些作业 。
横向对比世界其他国家机械臂 , 中国空间站机械臂操控精度、负载自重比和扩展性等指标均已达到世界领先水平 , 而且值得一提的是全部核心部件实现了国产化 。
【空间|技术派|太空巧手,中国空间机械臂技术领先世界】本文来自澎湃新闻
推荐阅读







- 技术|“2”类医械有重大进展:神经介入产品井喷、基因测序弯道超车
- 历史|科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 选型|数据架构选型必读:2021上半年数据库产品技术解析
- 技术|使用云原生应用和开源技术的创新攻略
- 技术|聚光科技旗下临床质谱仪获批医疗器械注册证
- Apple|苹果高管解读AirPods 3代技术细节 暗示蓝牙带宽可能成为瓶颈
- MateBook|深度解析:华为MateBook X Pro 2022的七大独家创新技术
- AirPods|苹果谈论AirPods 3:最大榨取蓝牙技术,希望获得“更多带宽”
- 人物|印度人接管硅谷的背后:技术军团整体作战