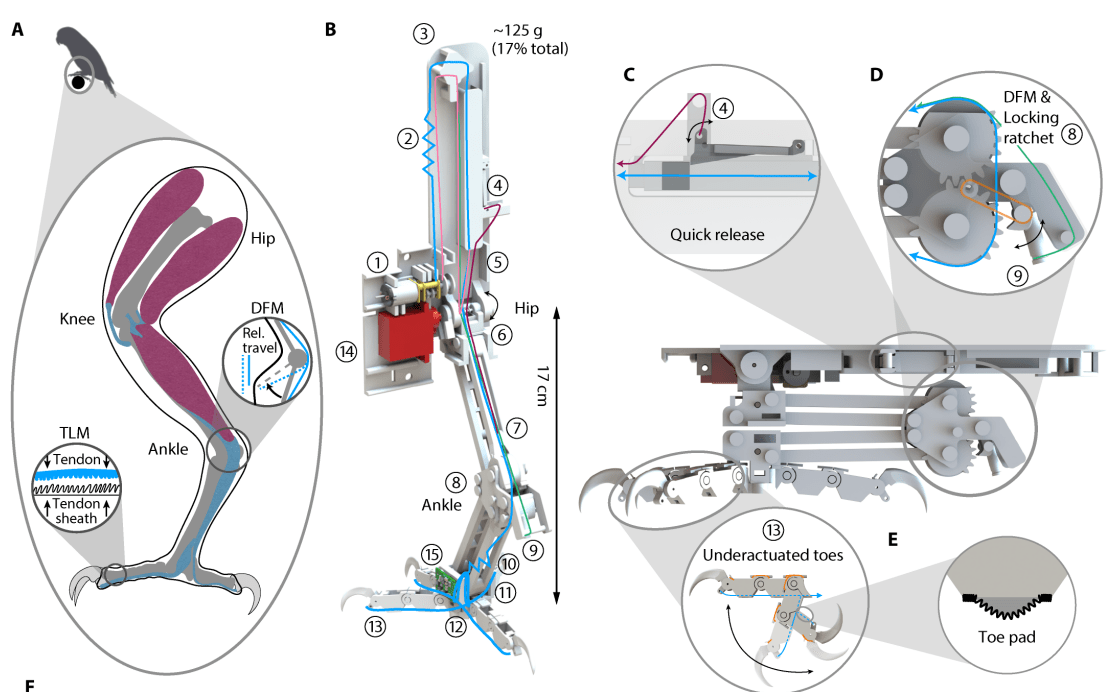
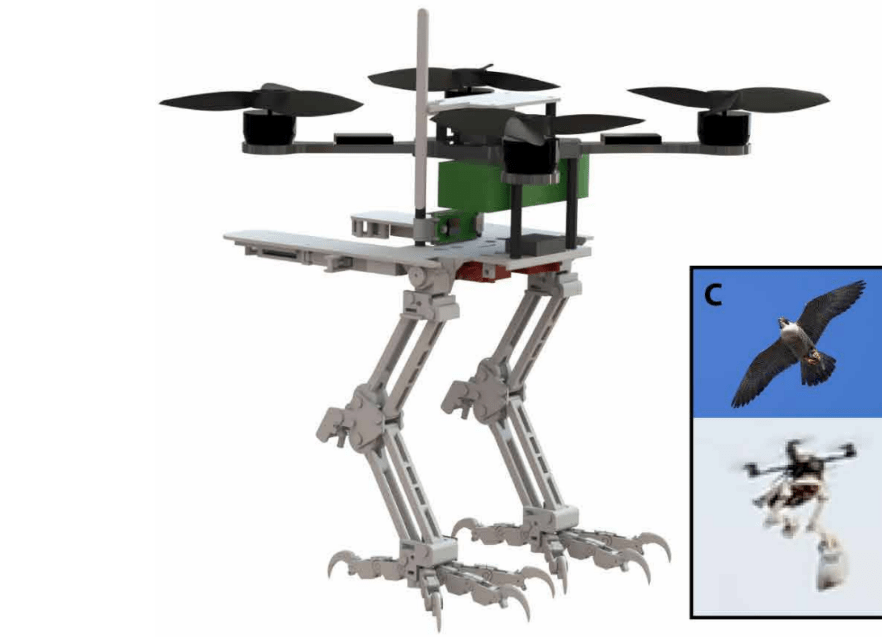
SNAG的“腿”的“骨头”是一个迭代了20次的3D打印结构 , 而“肌肉”和“肌腱”分别是马达和钓鱼线 。 马达在每条腿上都有 , 用于控制移动和处理抓握 。 该机器人腿部也有类似鸟类脚踝附近肌腱的机制吸收着陆冲击能量 , 并将其被动地转换为抓握力 。
该机器人有一个强大而迅速的离合器 , 它能在20毫秒内触发关闭 。 一旦缠绕在树枝上 , SNAG的脚踝就会锁定 , 其右脚的加速度计会报告已着陆 , 并触发平衡算法来进行稳定 。
文章图片
新冠疫情期间 , Roderick将3D打印机等设备从斯坦福大学Lentink实验室搬到俄勒冈州农村的一个地下室实验室 。 他将SNAG以特定速度和方向将机器人发射到不同的表面 , 检测其在各种场景的表现 。
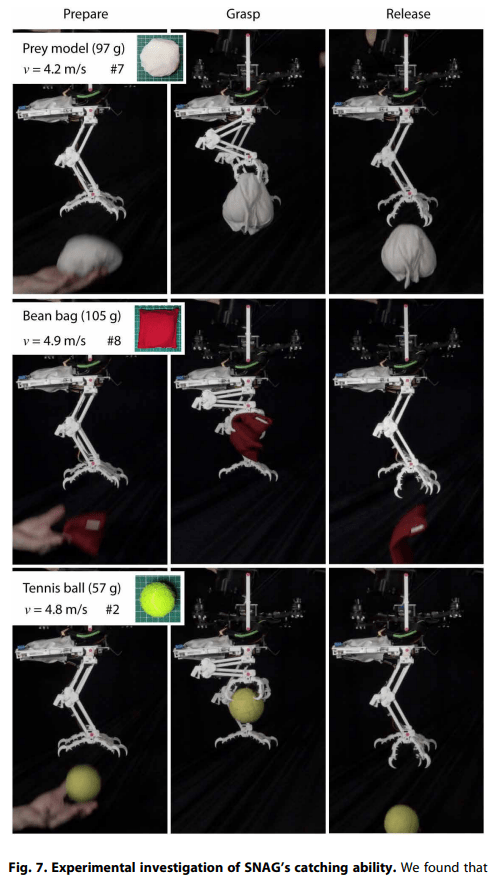
【脚趾|给无人机加爪子登《科学》子刊封面,斯坦福研发仿生鸟机器人】该机器人还能抓到人抛出的物体 , 诸如猎物模型、网球等 。
文章图片
最后 , Roderick还冒险进入附近的森林 , 将SNAG在现实中进行一些测试 。 总体而言 , SNAG 表现出色 。
研究者表示 , 这项研究最令人兴奋的应用之一是环境研究 。 Roderick在机器人上安装了一个温度和湿度传感器来记录俄勒冈州的小气候 。
由于该机器人可栖息 , 从而能节省能源 。 再配备太阳能等可再生能源 , 它就可以栖息在树上进行充电 , 并进行更长时间的监控 。
文章图片
这种机器人在未来还能用于火灾预警系统、天气模式监测、野生动物行为研究 , 甚至物理样本采集 。
此外 , 这项研究还可助于鸟类生物学 , 诸如更深入地了解鸟类成功栖息的原因 。
研究人员设计了两种不同的脚趾排列的机器人 。 “anisodactyl”有三个前脚趾、一个后脚趾 , 像游隼 , 这也是最常见的鸟足布局;“zygodactyl”有两个前脚趾、两个后脚趾 , 像鹦鹉 。 不过 , 他们发现两者之间的性能几乎没有差异 , 这表明这两种安排对于栖息在树枝上都是有效的 。
提及下一步工作 , 研究者表示 , 他们将改进其飞行控制和态势感知 , 并提高对恶劣条件(如雨或雪)的鲁棒性 , 使该机器人在自然环境中更好地表现 。
Lentink表示 , 他们将开发可以参与 XPRIZE Rainforest 项目挑战赛的机器人版本 , 其能监测生物多样性和气候变化 。
推荐阅读







- 人物|马斯克承认输给了巴菲特:曾尝试挑战喜诗糖果,但最终放弃
- 相关|科思科技:无人机地面控制站相关设备产品开始逐步发力
- 测试|图森未来完成全球首次无人驾驶重卡在公开道路的全无人化测试
- 最新消息|IT系统出错 英国银行给7.5万人多发11亿工资
- 矩阵|聚焦快递末端痛点 国内首款无人驾驶快递物流车在中通启动应用场景内测
- 市场|因时乘势 奋进启航|写给2022年的一封信
- Baidu|百度抢跑元宇宙 却默认“输给”字节?
- VIA|x86研发团队卖给Intel后 VIA出售厂房和设备:北美分部就此终结
- 人物|详解硅谷大佬关系链 谁给马斯克投资、谁陪伴乔布斯走完最后日子?
- 列车驾驶室|北京:体验无人驾驶地铁