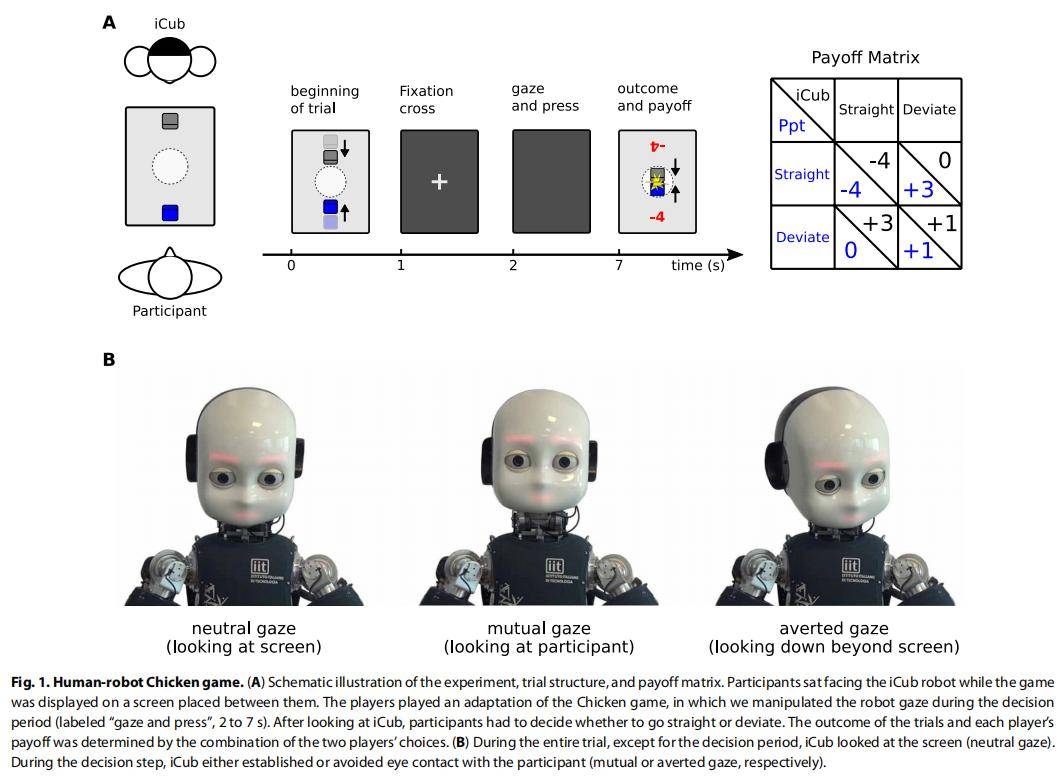
直视参与者 , 即两位玩家相互凝视;
iCub 向旁边看来避免眼神接触 , 即回避凝视 。
如下视频所示:
双方玩家都有一个遮挡物覆盖他们的动作按钮 , 从而防止对手预测他们的选择 。 游戏中可能的结果是:
两者都直走并碰撞 , 这种情况两者的损失最高;
两者都偏离 , 获得最高的联合收益;
只有一个直行 , 获得最高的个人收益 。
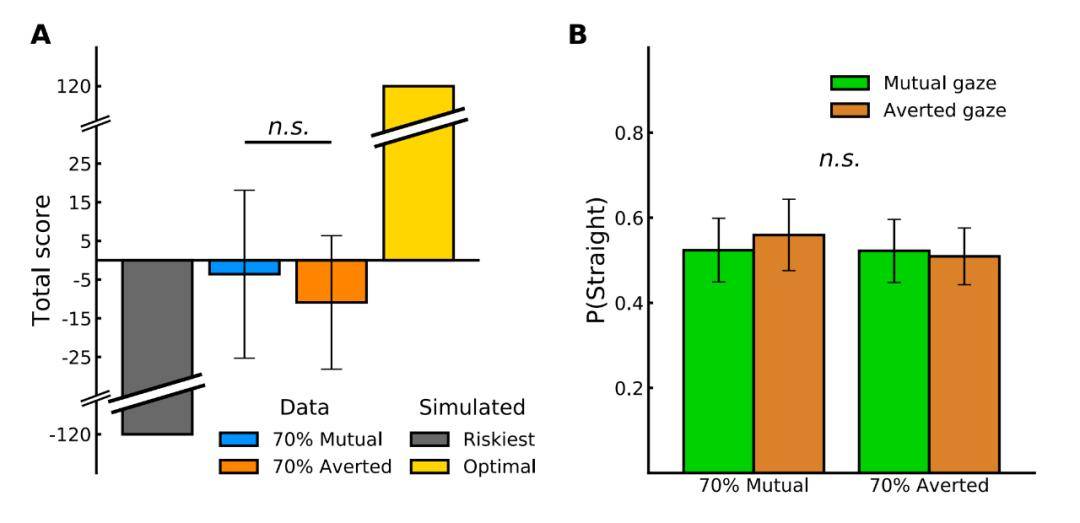
研究人员发现 , 当 iCub 呈 mutual gaze 状态 , 即与参与者相互凝视时 , 参与者会变得反应缓慢 。 延迟反应可能表明相互凝视与更高的认知努力有关 。 参与者的凝视一方面会对 iCub 的选择进行更多推理 , 另一方面可能增加与任务无关的凝视刺激抑制程度 。
文章图片
试想一下和机器人玩扑克的场景 , 当你需要决定下一步做什么时 , 机器人会看着你 , 然后当机器人移开视线时 , 它会做出决定 。 Wykowska 表示:人类玩家的大脑也需要通过一个费力且代价高昂的过程来试图「忽略」机器人的凝视 。
这些结果表明:机器人的视线「劫持」了人脑的「社会认知」机制 , 导致机器人会做出如同社交智能体的反应 。 从这个意义上说 , 机器人的「社交」并不总是对人类有益 , 即使与机器人交互很有趣 , 但是会阻碍人类决策的性能和速度 。
文章图片
参加者的表现及回应时间 。
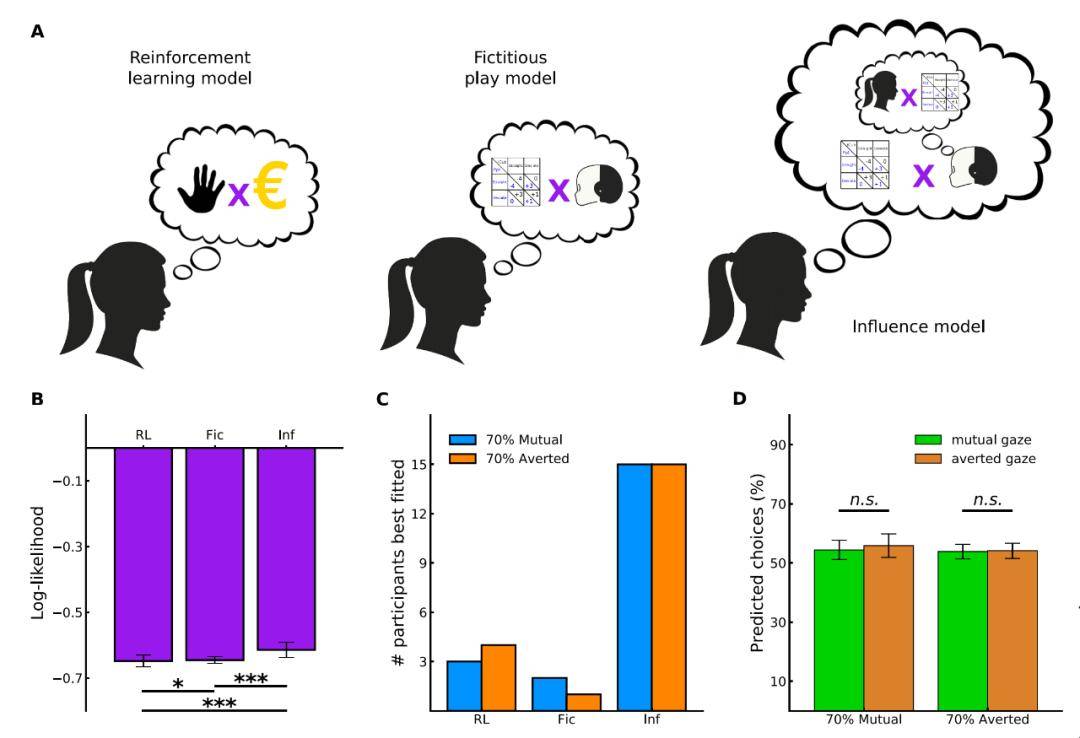
参与者为了推理 iCub 的行为运用了一些计算模型 。 下图 (a) 为模型示意图 。 强化学习模型(RL)根据最近选择的行动及其结果做出决定;虚拟游戏模型 (Fic) 根据游戏的 payoff 矩阵和对对手行为的预测做出决策;Inf 模型也是如此 , 同时假设对手也在预测玩家的选择 , 并将它自身行为对于对手决策预测的影响加以合并 。 下图 (b) 表明与参与者的选择相符的影响模型的整体对数似然比明显比其他两个模型更大 , 暗示了在游戏中 iCub 的高层次推理 。
文章图片
参与者对 iCub 行为推理的计算模型 。
Wykowska 和她的研究小组希望这些发现能帮助机器人工程师设计在特定应用环境中表现出最合适行为的机器人 。 比如 , 具有社交行为的类人机器人可能用于老人及儿童看护 , 像 iCub 机器人一样 , 这是自闭症治疗实验性治疗的一部分 。 但从另一方面看 , 当你需要专注于一项任务时 , 例如工厂设置或空中交通管制 , 散发社交信号的机器人却可能会分散注意力 。
参考内容:
推荐阅读







- 人物|马斯克谈特斯拉人形机器人:有性格 明年底或完成原型
- 硬件|Yukai推Amagami Ham Ham机器人:可模拟宠物咬指尖
- 王者|布局手术机器人赛道,谁是王者? | A股2022投资策略⑩
- 孙自法|中国科技馆“智能”展厅携多款机器人亮相 喜迎新年和人机共融时代
- 国际|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 猎豹|数字化助力实体消费 机器人让商场“热”起来
- 机器人|微创血管介入手术机器人获国际创业大赛冠军,获价值千万元奖励
- 观众|中国科技馆“智能”展厅携多款机器人亮相
- 观众|古筝机器人现场演奏,32件展品亮相中国科技馆“智能”展厅
- 汽车|现代汽车公布CES 2022参展主题:打造机器人和元宇宙全新移动出行体验