
文章图片
华为拿出的每一项产品与方案都能够精准的应对行业发展的痛点 , 这是华为多年在汽车领域探索的结果 。
文丨AutoR智驾 诺一
智能汽车时代的华为比智能手机时代的华为更为来势汹汹 。
今天(4月18日)华为在上海直接拿出来针对智能汽车一系列的解决方案 , 包括了“华为八爪鱼”自动驾驶开放平台、4D成像雷达、热管理解决方案、HarmonyOS智能座舱、MDC810在内的新一代智能化部件和解决方案 。
这五大技术 , 是目前智能汽车 , 最具代表性和竞争力的技术 。
因此 , 主机厂与华为合作 , 只需要负责传统的底盘 , 转向等机械层面 , 就可以造出高质量的智能电动汽车 。
华为智能汽车解决方案BU总裁王军表示:“Huawei Inside创新模式是为了充分发挥华为的新技术优势与车企的整体功能优势 , 为消费者打造高端智能汽车 , 带来美好的出行体验 。 ”
“华为八爪鱼”自动驾驶开放 , 算法工程师不再996
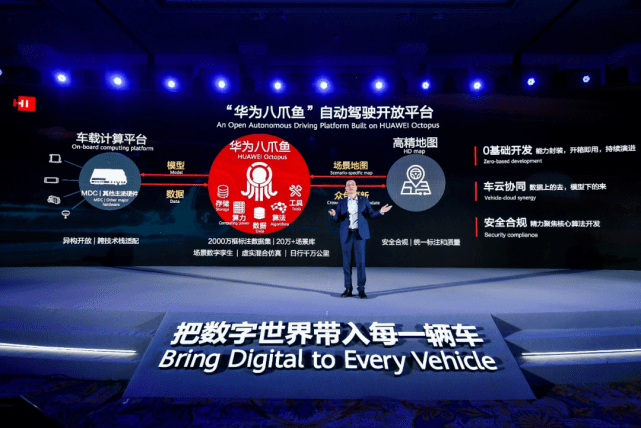
“华为八爪鱼”自动驾驶开放平台是围绕自动驾驶开发最关键的四大要素——硬件、数据、算法和高精地图 , 构建一套以数据为核心 , 驱动自动驾驶闭环迭代的开放平台 。
文章图片
并通过车云协同的能力封装、标注能力、升级的虚拟仿真 , 以及安全合规的一站式云服务 , 协助车企“0”基础构建自动驾驶开发能力 , 降低开发门槛 , 提升开发效率 。
具体来说 , “华为八爪鱼”平台具备三个能力:
第一 , 把算法、数据、算法解耦 , 实现了车云协同 。 平台既可以支持华为MDC , 也可以支持其他主流的异构硬件 。 高精地图也是解耦的 , 支持NDS、OpenDrive等多种主流标准;
第二 , 华为将沉淀积累的平台能力开放出来 , 通过预置的2000万框标注数据集、20万仿真场景库、完整工具链和标注算法 , 以及场景数字孪生、虚实混合仿真、日行千万公里的大规模并行仿真等服务 , 实现了自动驾驶的0基础开发 , 真正做到了开箱即用;
第三 , 华为的云服务是完全安全合规的 。
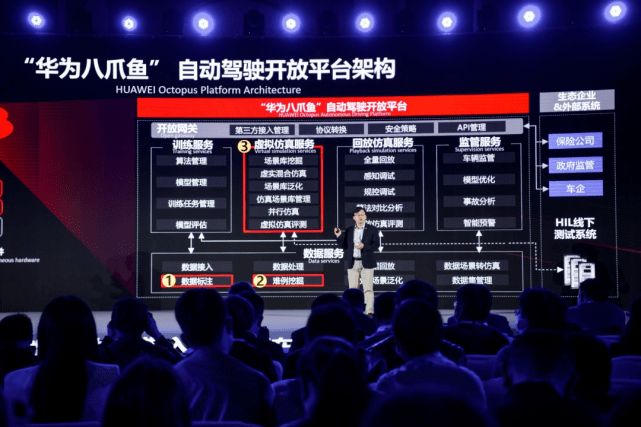
智能车云服务CTO 喻杰称 , “该平台全面地覆盖了自动驾驶开发的各个阶段 , 并且作为一个开放平台 , 可以支持丰富的API及数据接口 , 允许合作伙伴进行二次开发 。 ”
文章图片
发布会上 , 喻杰还阐述了华为是如何提升感知模型精度 , 并达到业界领先水平;如何通过模型适配、感知协同 , 实现了数据与算法在云端与车端之间的高效闭环;以及如何将整个开发流程纳入DevOps , 加速规控算法的仿真测试和迭代优化 。
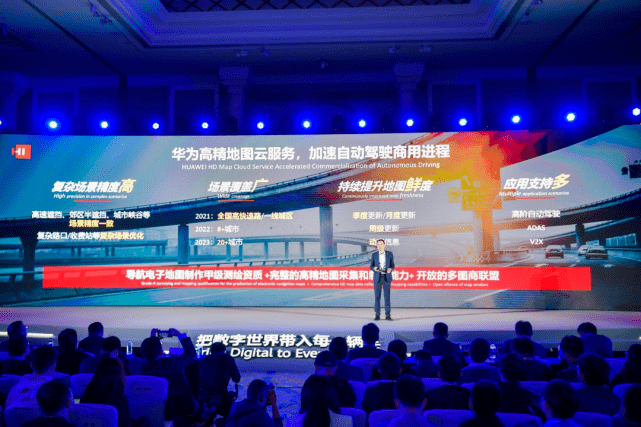
感知模型精度层面 , 华为发布了高精地图云服务最新的能力及路标 , 并将在精度、广度、鲜度全方面满足各车企自动驾驶商用化的要求 。
廖振钦表示 , “高精地图是自动驾驶中的重要元素 。 华为已经拥有了导航电子地图制作甲级测绘资质 , 也具备完整的高精地图采集和制图能力 , 所以我们有信心今年能支持真正的商用化 。 ”
文章图片
华为计划今年完成全国高快速路与北上广深的高精地图 , 往后持续扩大覆盖范围 , 2023年覆盖20多个主要城市 。
而加速自动驾驶开发 , 需构建一套开放的数据闭环系统 。
廖振钦认为 , “传统软件的开发可以按照结构化程序设计的方法 , 即Pascal之父沃斯在40多年前提出著名的“算法+数据结构=程序” 。 ”
自动驾驶软件的开发 , 本质上是人工智能技术的应用 , 是要造一个“驾驶员” 。
人工智能技术发挥作用需要数据、算法和算力这三个要素 , 其中 , 自动驾驶软件中的数据是核心要素 , 是车企自己必须积累的 。
因此 , 华为在自动驾驶开发架构上 , 要把硬件、数据和算法进行分离 , 将这些数据独立解耦出来 , 将有利于灵活地选择更开放的硬件和算法 。
华为认为 , 上云 , 是自动驾驶从开发到商用的必由之路 。
自动驾驶汽车从开发到商用 , 数据闭环系统建设会面临更大挑战 。 对算力、存储要求的扩大 , 对云资源的高可靠性、安全性的要求 , 将从试验阶段转为商用要求 。
最新发布的《智能网联汽车生产企业及产品准入管理指南(试行) 》对自动驾驶云端数据在合规、安全、隐私等方面提出了更高的要求 。
廖振钦认为 , “传统的数据中心已经不能适应自动驾驶商用化的要求 。 上云是自动驾驶从开发到商用的必由之路 。 ”
可以说 , 使用“华为八爪鱼”自动驾驶开放平台 , 能确保车辆在各个地区都能就近接入云端 , 并解决商用过程中所面临的覆盖、安全、弹性扩展等问题 。
开发者将不再为机房专线、升级扩容伤脑筋 , 精力可以都放在核心的算法开发上 。
众所周知 , “华为八爪鱼”构筑于华为云底座 。 基于全球23个Region , 45个AZ , 可实现全球范围的就近服务和异地容灾 , 并具有电信级高可靠性 。
车企自动驾驶开发团队 , 将不再为了机房专线、安全合规、容灾备份、升级扩容 , 和运维管理等问题而大伤脑筋 , 可以将更多的精力投入到自动驾驶核心算法的开发上 。
文章图片
综合来看 , “华为八爪鱼”自动驾驶开放平台具备5大亮点特性 :
第一 , 预置业界领先的自动标注模型
“华为八爪鱼” 自动驾驶开放平台团队和华为诺亚实验室打造联合团队 , 持续攻关 , 感知算法精度已经达到业界领先水平 , 解决了复杂场景或远端目标的漏检、错检等业界难题 , 并在多个自动驾驶国际公开数据集测试挑战中获得领先的名次 。
以3D点云目标检测为例 , 华为融合了激光雷达和摄像机等不同传感器提取的多种信息 , 同时采用对多视角、多时序数据融合的方式提取目标特征 , 通过多层卷积网络迭代 , 融合不同特征 , 最终实现了对3D点云目标的精准识别和检测 。 再结合云端强大算力 , 可以将这种超大模型的训练效率提升10倍以上 , 进而提高车端感知模型的迭代速度 。
第二:车、云协同 , 难例场景智能筛选
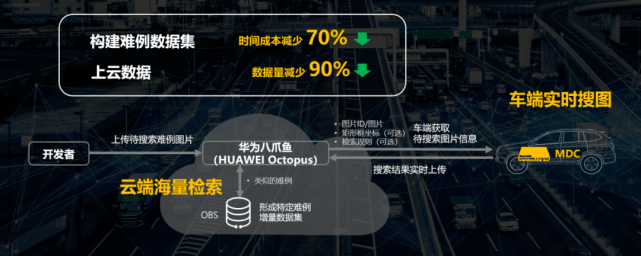
通过云和车载计算平台MDC协同 , 可以实现难例场景的智能筛选 , 解决智能化分析检测算法的性能瓶颈 , 有针对性的收集车端和云端数据 , 发掘数据中的难例(Corner case), 极大的缓解长尾问题(Long tail problem) 。
开发者向云端上传期望搜集的难例图片 , 云端会把难例搜集规则下发给车辆 , 车辆则会检测摄像机捕捉到的实时数据流 , 找到类似的难例场景 , 截取相应图片并回传到云端 , 形成特定场景的难例数据集 。 这种方式可以减少90%的上云数据 , 并节省70%的数据集构建时间 。
第三:与高精地图结合 , 实现真实场景数字孪生和虚实混合仿真
规控算法开发迭代过程中最耗时的是测试验证 。 一方面 , 自动驾驶车辆需要天文数字级的里程测试来验证 , 而另一方面 , 测试场景的构建又成为了这一环节最大的难点 。
文章图片
虚拟仿真是提高自动驾驶验证效率的有效手段 , 但它对场景库的多样性及虚拟仿真的真实感要求非常高 。 “华为八爪鱼”自动驾驶开放平台可以将采集的典型路段转换成仿真场景 , 并与高精地图相结合 , 实现真实场景数字孪生 。 这种方式可以实现95%以上的场景还原能力 , 能有效帮助开发者快速模拟周边车辆 , 实现分钟级的场景构建 , 并有效验证复杂的城市交通场景 , 支撑SIL(软件在环)验证 。
前面提到的真实场景数字孪生能力解决了复杂仿真场景构建的问题 , 但如何体现车辆在测试场景中的真实动力学表现 , 成为了另一道难题 。
通过动力学仿真软件模拟的真实性有待提升;通过真实场景实车测试 , 周期又很长 。 为解决这个问题 , “华为八爪鱼”自动驾驶开放平台又提供了虚实混合仿真能力 。
这种虚实混合仿真 , 通过结合真实车辆和虚拟场景 , 实现了线上线下协同 , 通过在云端构建测试场景 , 再将仿真测试场景加载到车端运行 , 从而在空旷的道路或场地模拟出各种需要的虚拟场景、危险场景 , 比如跟车、行人横穿、非机动车CUT-IN、避让静态障碍物等各种场景 , 以测试验证自动驾驶算法、实车的车辆动力学性能 , 以及驾乘体验 。
“华为八爪鱼”自动驾驶平台通过这种车云协同的方式 , 极大地加速了VIL测试的效率与质量 。
第四:完整工具链 , 一站式自动驾驶DevOps能力
“华为八爪鱼”自动驾驶开放平台提供了云端一站式仿真评测工具链 , 实现自动驾驶领域的DevOps , 从代码仓库接入、版本管理 , 到仿真、评测 , 实现了完整的自动化闭环 。
通过大规模并发仿真 , 达到规控算法迭代速度的量级提升 , 可实现虚拟仿真测试里程日行千万公里 。 这种高效的模式 , 将规控算法评测周期从原来的天级缩短到了小时级 , 整个算法的迭代周期也从周级缩短到了天级 。
第五:预置海量数据集和场景库
“华为八爪鱼”自动驾驶开放平台可提供50多类、120多万张、超过2000多万对象的标注数据集 。 并且这些数据还会月度迭代 , 逐步增长 。 结合高效的标注工具 , 以及智能预标注算法 , 可以帮助自动驾驶开发者构建完整的数据采集、处理、自动化标注、难例挖掘、生成增量数据集等感知算法快速迭代能力 。
此外 , “华为八爪鱼”自动驾驶开放平台构建了20多万仿真场景库 , 支持场景库泛化能力 , 并且可以通过真实场景数字孪生和虚实混合仿真帮助自动驾驶开发者快速构建高还原度的仿真场景 , 大幅提升了仿真测试的效率 。
业界最大算力智能驾驶计算平台:MDC 810
华为全新一代智能驾驶计算平台MDC 810 , 它是业界目前最大算力的智能驾驶计算平台 , 目前已具备量产能力 。
华为MDC 810 , 稠密算力高达400 TOPS , 达到ASIL D功能安全要求 , 搭载智能驾驶平台软件MDC Core(含智能驾驶操作系统AOS、VOS) , 配套完善工具链 , 可满足拥堵跟车(TJP)、高速巡航(HWP)、自动泊车(AVP)等高级别自动驾驶应用场景所需 。

文章图片
华为智能汽车解决方案BU MDC产品部总经理李振亚表示:“当前 , 智能驾驶产业节奏明显加快 , 已经到了量产冲刺阶段 。 华为MDC坚持平台化标准化理念 , 通过持续资源投入与研发创新 , 突破硬件工程、软件工程及安全工程等量产难题 。 华为MDC , 为业界打造最强的专业智能驾驶计算平台 , 加速智能驾驶汽车量产落地 。 ”
智能驾驶计算平台突破量产难题 , 是一个复杂的系统工程 , 需要克服硬件工程、软件工程、安全工程等诸多挑战 , 才能真正把底层技术实力转化为工程量产能力 。

文章图片
在硬件工程上 , 要实现防尘防水、防凝露、抗电磁干扰等能力;在软件工程上 , 作为集中式计算平台 , 需考虑底层硬件资源的隔离与共享 , 将平台级的确定性低时延做到最优;
在安全工程上 , 除了满足ASIL D确定性功能安全外 , 还要对预期功能安全SOTIF有所考虑 , 同时结合华为公司多年网络安全经验的积累 , 构建全面的网络安全架构与防护能力 。
一般来说 , 智能驾驶计算平台真正达到量产状态 , 业界平均需要2~3年时间 。
据李振亚介绍 , “MDC自2018年首款产品面世以来 , 一直在持续积累量产能力 。 ”
作为智能驾驶计算平台 , 华为MDC采用“统一硬件架构 , 一套软件平台 , 系列化产品”的研发规划 。
华为MDC系列产品(MDC 210/MDC 300F/MDC 610/MDC 810) , 基于领先的基础平台与安全架构 , 提供48~400+ TOPS的弹性算力与丰富的传感器接口 , 配套持续升级的平台软件MDC Core(含AOS、VOS等) , 前向兼容长期平滑演进 , 保护客户历史投资与持续能力积累 , 覆盖L2+~L5级别自动驾驶的乘用车、商用车、作业车等不同应用场景 。
高阶自动驾驶下一个必备武器:4D成像雷达
华为首次公开发布了高分辨成像雷达产品和解决方案 , 在发布会上 , 华为融合感知产品部Radar & Camera总经理苗立靖就成像雷达3大核心能力 , 大阵列高分辨、大视野无模糊、4D高密点云和6大价值场景进行了全面的阐述 。
相比激光雷达和摄像头 , 毫米波雷达具备极佳的测速能力、极佳的天气和光线鲁棒性(不受光线和雨雪天气影响) , 以及非视距被遮挡目标的独特探测能力 。
高分辨4D成像雷达在继承这些优势的同时 , 大幅提升分辨率 , 目标检测的置信度和检测范围(如距离和FOV) , 同时进化出像激光雷达一样的高密度点云 , 可带来丰富的感知增强应用 , 比如环境刻画 , 雷达构图 , 定位等 , 也可以通过多雷达的点云级融合 , 更好实现车周的360°检测 。 4D成像雷达必然会带来革命性的变化 , 成为高阶自动驾驶下一个必备武器 。
华为毫米波雷达团队从2017年开始技术预研 , 用了2年时间 , 完成基础技术与能力的验证 , 完成技术验证和市场分析 , 确定第一代产品方向 。
2019年正式启动商用产品开发 , 包括中距和短距两个产品 。 去年完成第一次夏测和冬测 , 预计今年实现首项目SOP交付 , 2022~2023年将有更多项目量产 , 有希望快速实现年发货超百万 。
在第一代雷达研发的同时 , 华为也看到自动驾驶或者说体验意义上的自动驾驶逐步走向量产 。
它带来了传感器的全新要求 , 辅助驾驶更多关注人车检测 , 自动驾驶要求全目标检测 , 而且要求高置信度 , 比如准确检测100米外障碍物 。
自动驾驶对感知覆盖的要求也大幅提升 , 纵向300米车辆 , 横向120° , 同时为支持自动变道功能 , 车周360°都需要连续跟踪 。
自动驾驶诉求总结下来就是四”全” , 全目标 , 全覆盖 , 全工况和全天候 , 这就是理想传感器目标 。
全目标:原来辅助驾驶的检测目标更多是车和人 , 自动驾驶要求全面检测路面或路边静止物 。
全覆盖:纵向检测需要覆盖200米以外的车辆 , 横向的FOV检测也从90°提升到120° 。 为了实现安全自动变道等高级功能 , 车周身的360°目标都需要连续检测 。
全工况:原来辅助驾驶更多考虑的是高速场景 , 当前自动驾驶由高速开始 , 逐步考虑城区扩展 , 同时一些极限、特殊场景也需成为感知能力范围 , 如拥塞、事故 。
全天候:为了保证体验连续性 , 需要考虑不同天气和不同光线条件等复杂环境下 , 传感器仍具备可靠的感知能力 。
面向这些诉求 , 摄像头率先演进 , 2MP升级到8MP , 搭载数量每车5个到10个以上 , 高线数激光雷达也陆续成为主流量产车型的必备选择 。
剩下一个命题是毫米波将如何演进?
华为认为毫米波的下一步演进就是高分辨4D成像雷达 , 4D是指检测目标的4个维度 , 包括它的速度、距离、水平角度和垂直角度 , 传统雷达水平分辨能力不足 , 不支持垂直分辨 , 导致看不清 , 看不准 。
近年来自动驾驶事故中 , 感知不足是重要原因之一 , 比如没有有效识别静止车辆或事故车辆 , 隔离桩或护栏判断不准导致严重事故 。
4D成像雷达大幅提升水平和垂直的角度测量能力 , 满足全目标 , 全覆盖和多工况的感知要求 , 逐步接近理想传感器目标 , 将和摄像头、激光雷达形成有效融合和冗余 , 打造满足自动驾驶要求的感知铁三角 。
华为正式发布的下一代高分辨4D成像雷达 , 在3个方面实现能力的断代性提升:
第一个是大阵列高分辨 。 提高角度分辨 , 单纯依靠软件算法虽有部分优化方案 , 但华为认为更普适、更可靠的方式是增加天线阵列 , 加大天线口径 , 实现能力的跨越式提升 。
华为高分辨4D成像雷达采用12个发射通道 , 24接收通道 , 比常规毫米波3发4收的天线配置 , 整整提升了24倍 , 比业界典型成像雷达多50%接收通道 , 这是短期可量产的最大天线配置成像雷达 。
通过这样的超强硬件配置 , 水平角分辨率将从传统的3~4° , 提升到1° , 垂直高度分辨也从无到有 , 达到2° , 这是天线能力口径 , 软件优化还有进步空间 。 更重要是角测量精度也将从0.2°度提升到0.1° , 对城区拥堵等密集场景非常有意义 。
第二是大视场无模糊 。 水平视场从90°提升到120° , 垂直视场从18°提升到30° , 纵向探测距离从200米提升到300米以上 。 覆盖范围(距离+FOV)的扩展 , 一方面由自动驾驶功能驱动 , 另一方面来自多传感器融合冗余需求 。 例如 , 8MP摄像头采用30°+120°两个模组 , 实现远距30°内 , 大于500米车辆感知 , 近距支持120°内的200米覆盖 。
通过大阵列设计 , 一个4D成像雷达可支持远近两种波形 , 兼顾远距和近距广角覆盖 , 长波形支持18°内超过300米覆盖 , 短波形实现120°内的150米覆盖 , 完全满足十字路口等城区场景要求 , 将对齐摄像头和激光雷达目标 。
还要特别强调的是无模糊能力 , 传统雷达角度测量有多性 , 就是一个目标可能计算出多个角度方向 , 需要进一步算法消除 。
华为4D成像雷达通过天线排布和信号处理优化 , 实现角度无模糊 , 准确识别目标 , 在人车混流、十字路口的多目标场景非常有用 , 可以避免角度模糊结果和真实反射混到一起 , 减少虚警 , 形成高置信度点云 , 并简化后端点云跟踪算法 , 避免多帧消除的处理时延
第三是4D高密点云 。 作为综合能力提升的结果 , 毫米波雷达也可以像激光雷达一样支持高密度点云 。 成像雷达的4D点云 , 也就是速度 , 距离 , 水平角度和垂直高度 , 相比激光雷达点云 , 多一个速度维度 , 可以有更多的维度对目标物体进行诠释 。
相比传统雷达 , 4D点云带来丰富的感知增强应用 , 比如环境刻画 , 雷达构图 , 定位等 , 也可以通过多雷达的点云级融合 , 更好实现车周的360°检测 , 这将会带来革命性的变化 。
比如利用MDC的大算力资源 , 引入AI方案增强目标跟踪;也可以基于点云 , 实现分米级精度的构图与定位 。 需要补充的是 , 因为毫米波的天气和光线鲁棒性非常好 , 基于毫米波的构图与定位将有非常大的应用空间 。
另外 , 点云处理意味需要点云采集及域控软件配套 , 华为在这方面会有非常强的合作开发能力 。 华为4D成像雷达的开发团队主体在中国 , 数据分析和采集 , 中国场景会优化的更充分 , 在与OEM域控软件对接中 , 实现高效联合开发 。
对于4D成像雷达的组网 , 华为灵活支持3种架构:对接小算力域控 , 雷达仅输出目标;对接大算力域控 , 所有跟踪处理在域控完成 , 仅输出4D点云;或点云+目标混合输出模式
在用户价值上 , 华为提炼总结了4D成像雷达的6大场景价值
1、高速巡航场景:要保障高速巡航的行车体验 , 主要指标是看的更远更清 , 避免急刹 。 典型场景是前方拥塞时 , 130kph下舒适性刹停 , 需要判断220米外前车是处于本车道还是邻车道 。
4D成像雷达支持1°水平分辨 , 300米的车辆检测跟踪 , 这样即便220米外两辆车完全同速同距 , 位于相邻车道 , 也可以通过角度分辨出来
2、安全避障:无论自动驾驶还是辅助驾驶 , 安全仍是首要问题 , 对传感器最迫切诉求是静止障碍物检测 , 这是传统毫米波的短板 。 4D成像雷达点云密度提升10倍 , 大幅提升静止目标检测置信度 , 小障碍物检测也有很好表现 。 例如锥桶探测距离达到110米 , 也可实现护栏静止车分辨
支持静止物检测 , 就必须有效区别地面静止物或悬空物 , 比如不能把龙门架上报为障碍物 。 成像雷达通过2°垂直分辨 , 极限场景可通过高度测量 , 分辨220米外龙门架和下方静止车 , 保证不会被误判障碍物
3、城区巡航:高阶自动驾驶中 , 城区场景是最难的 , 主要挑战是大量横向运动检测 , 和多目标的复杂工况 , 如人车混行场景(近端行人 , 车辆L型);人/自行车等VRU和公交的大小目标并行场景;被遮挡场景 , 施工区护栏变窄场景等 , 成像雷达大视场无模糊能力可以很好地匹配城区要求 。
此外测角精度和高动态能力也非常重要 。 测角精度从0.2°提升到0.1° , 50米横向测量误差将小于10cm , 100米测量误差小于20cm , 这对城区场景 , 狭窄区域可通行判断非常有用 。 同时 , 成像雷达具备更高动态范围 , 对公交车和行人并排 , 大小目标场景也可准确检测
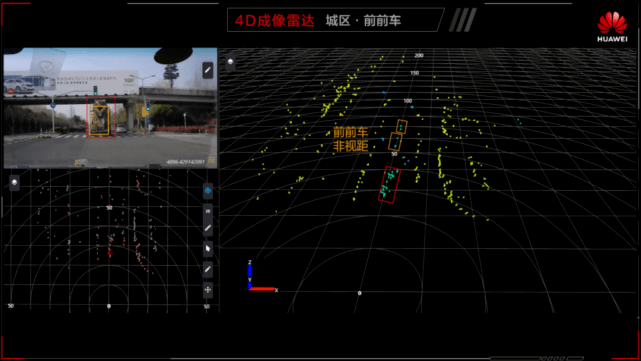
4、非视距前前车检测:被遮挡或部分被遮挡目标感知是毫米波独特能力 , 就是电磁波信号从车辆底盘下方传播 , 实现非视距目标探测 。 相对传统雷达 , 因为4D成像雷达的多径处理能力更强 , 典型场景前前车的探测能力将提升100%以上 。
4D成像雷达可以看到前车 , 前前车 , 和前前前车 , 甚至可以看到前前车的大致底盘轮廓 , 通过对前前车的感知 , 比如有急减速 , 可提前预判前车动作 , 减少连环追尾风险 。
文章图片
5、环境刻画:4D点云有很多应用 , 环境刻画是最典型的一个 , 通过150米以上的护栏探测 , 有效确定道路边界;
通过高精度测高 , 准确判断地面、地上、空中等不同高度目标 , 勾勒3D道路拓扑结构;
最后通过人车障碍物等点云处理 , 可以生成10cm精度的可通行区域 , 形成完全匹敌激光雷达和摄像头的环境刻画
6、360°全方位检测:最后一点是也是4D点云应用 , 就是全车多雷达的点云集中在域控上处理 , 实现从“目标级融合”到“检测级融合” , 融合后点云对360°车辆连续跟踪非常有用 。
比如后向超车场景 , 从迫近到超越 , 融合点云整个过程是连续的 , 确保跟踪过程平稳 , 最大避免跟踪ID跳变 。这样Cut-in检测或意图判断也可以提前进行 , 有助于解决近距Cut-in问题 。
综上所述 , 华为高分辨4D成像雷达总结为3大能力 , 6大价值:
3大能力:4倍分辨率提升 , 大视场无模糊 , 4D高密点云 。
6大价值:高速巡航超远感知 , 高速巡航避障 , 城区多目标复杂场景可用 , 非视距感知 , 环境刻画 , 多雷达点云360°融合
正是有着如此之多的独特优势和需求驱动 , 华为认为 , 成像雷达必然会成为下一个高阶自动驾驶的必备武器 , 和高线数激光雷达 , 高清摄像头一起 , 使智能汽车实现高阶自动驾驶 。
HarmonyOS上车:2K分辨率才是标配
华为的智能座舱解决方案包括了麒麟模组的计算平台、面向座舱的软件平台、显示平台和软硬件生态 。

文章图片
华为智能汽车解决方案BU智能座舱产品部总经理王庆文表示 , “多场景的一致性体验是座舱智能化的关键 , 华为通过硬件生态实现车内外分布式设备的互联互通 , 共同接入到计算平台和软件平台 。 ”
为了保证车辆生命周期内长期系统流畅 , 华为设计了可插拔式的麒麟车机模组 , 让芯片、模组能够方便的升级迭代 , 让座舱时刻保持巅峰性能 。
Harmony车机操作系统是华为打造的面向“车”的OS , 通过一芯多屏、多并发、运行时确定保障等能力 , 满足出行场景需要 。
基于HarmonyOS , 车机与其他智能终端之间有分享和联系 , 用一套系统满足各种硬件设备 , 将人、车、家打通 , 实现真正意义上的万物互联 。
华为提供了语音、视觉、声音分区、音响音效、触控等HMS-A核心能力 , 并把这些能力以API的方式完全开放出来 , 让车企、一级供应商、应用生态伙伴去开发满足用户诉求的功能、服务、特性和应用 , 以此加速整个车的智能化转型 。
本次发布会上 , 华为还推出了AR-HUD及车载智慧屏两大显示产品 , 基于光技术领域的长期积累及AR引擎等黑科技 , 华为打造了小身材、大视角、高清画质的AR-HUD 。

文章图片
华为本次新发布的车载智慧屏拥有15.6寸、2K分辨率的大屏幕 , 窄边设计使屏占比高达87% 。
基于麒麟芯片和软件的一体化调教 , 车载智慧屏的色彩显示栩栩如生 , 屏幕达到莱茵护眼的标准 。
搭载NFC和毫米波雷达后 , 车载智慧屏还能支持一碰传、一碰连及手势控制 。

文章图片
当前 , 华为已经有50多个应用伙伴 , 后面还会有越来越多的伙伴加入到应用生态中 。
王庆文说 , “我们希望能够同车企、一级供应商、应用伙伴、外设的硬件伙伴联合起来 , 在华为公司提供的软件操作系统和核心计算平台之上 , 合作共赢 , 加快实现座舱的智能化” 。
集成度最高热管理解决方案:续航提升20% , 标定周期缩短60%
发布会最后 , 华为发布业界集成度最高的智能汽车热管理解决方案(Thermal Management System , 以下简称TMS) 。
华为TMS通过一体化设计的极简架构、部件和控制集成等创新技术 , 可以在满足舒适性前提下将热泵工作温度由业界的-10℃降低至-18℃ , 从而将新能源车续航提升20% , 同时通过个性化应用提升用户体验 , 助力车企打造能效最优、体验最优的热系统 。
文章图片
华为智能车控产品部总经理王雷在发布现场指出 , 华为TMS通过一体化设计、部件和控制两个集成 , 可以实现能效、标定效率、体验三大提升 。
传统热系统方案中 , 电驱、电池、乘员舱独立管理 , 协同性差 , 导致整体功耗偏高、体验差 。
华为TMS通过一体化极简架构设计 , 打通电驱、电池、乘员舱等领域 , 并降低热泵低压侧不可逆损失 , 实现整体能耗最优、体验最佳 。
部件集成方面 , 华为TMS将传统热管理系统中12个部件集成为一体 , 采用基板替代原有的互通管路 , 实现热管理系统管路数量降低40% , 易于安装和维护 。
而在控制集成上 , 压缩机、水泵等关键部件的控制系统全部集成至EDU(Electric Drive Unit ) , 大幅降低部件电控故障率 , 同时便于系统智能化及全生命周期诊断维护 。
三大提升则是能效提升、标定效率提升和体验提升 。
能效提升:通过极简的水源架构以及高度集成 , 降低系统流阻和控制复杂度 , 将热泵系统最低工作温度由业界的-10℃降低至-18℃ , 相比传统非热泵方案能效比提升至2倍 。
标定效率提升:业界首创智能自标定算法 , 通过自动评价、自动参数优化代替人工标定 , 将标定周期从传统的4个月降低至1.5个月 , 标定周期缩短60% 。
体验提升:通过车辆数据上报、大数据分析 , 实现智能热舒适性控制、智能空气管理、智能预测性维护 , 大幅提升用户体验 。
在演讲的最后 , 王雷表示 , “热泵技术已经成为行业大势所趋 , 华为率先推出集成式TMS解决方案 , 可以帮助车企打造能效最优、体验最优的热系统 , 助力热管理行业迈向新的高度 。 ”
站在智能汽车发展的今天 , 华为拿出的每一项产品与方案都能够精准的应对行业发展的痛点 , 这是华为多年在汽车领域探索的结果 。
而华为与北汽推出的阿尔法 HI版车型正式上市 , 也证明了华为在智能汽车时代展现出的实力 。
【油门|华为给智能汽车时代深踩了一脚油门】这一实力还将继续放大 , 对应着是华为每年10亿美元在汽车领域的投入 。
推荐阅读







- 人物|马斯克承认输给了巴菲特:曾尝试挑战喜诗糖果,但最终放弃
- 最新消息|IT系统出错 英国银行给7.5万人多发11亿工资
- MateBook|深度解析:华为MateBook X Pro 2022的七大独家创新技术
- 果君|华为Mate X2 典藏版竟逼疯整个摄制组?拯救手滑的神器终于来了(视频)
- 市场|因时乘势 奋进启航|写给2022年的一封信
- Baidu|百度抢跑元宇宙 却默认“输给”字节?
- 测评|【横评】5年前的老机型测评 苹果华为三星小米魅族一加现在卡吗
- VIA|x86研发团队卖给Intel后 VIA出售厂房和设备:北美分部就此终结
- 警告!|华为联想卷入滴滴高管千万受贿案 判决书曝光浪潮曾向其输送720多万
- 娱乐|华为智慧屏迎来“影音娱乐”场景三大升级