新浪科技综合|科学大家|星辰大海:天问一号的奔向火星之路( 七 )
在最后一到两公里时 , 把背罩抛掉 , 伞与飞行器分离 。 平台接下来只能依靠自身的发动机进行工作 。 动力减速过程中需要对障碍进行识别和规避 , 最后着陆到火星的表面 。 这个过程风险指数最高 , 后面会提到其中的难点和解决的问题 。 着陆到火星表面之后旋梯展开(如下左图所示) , 祝融号驶离 , 右图是祝融号桅杆上的导航相机对自己的一个自拍 。 祝融号上面有一个太阳能集热器 , 这个车上另开有两个天窗 , 其作用在后面也会提到 。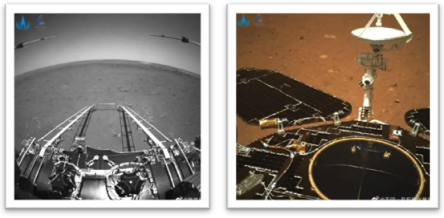
文章图片
图22/39
下图是着陆后火星车和平台的合影实拍 。 火星车释放了一个小的无线照相机 , 拍摄之后照相机把信息传到火星车上 , 火星车再把信息传到环绕器上 , 最终传回地面 。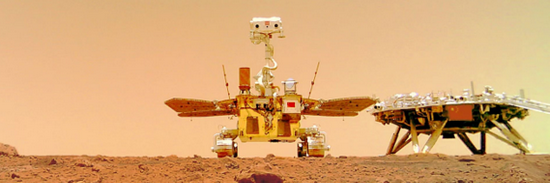
文章图片
图23/39
祝融号在火星表面的探测分为三大任务 。 第一个任务是感知 , 在启动之前会对周围进行扫描 , 把周围的地形地貌通过相机的拍摄传到地面 , 地面可以根据这些信息建立起周围的三维影像结构 , 并规划车行走的路线 。 第二个任务是移动 , 车根据地面的指令进行移动 。 第三个任务是探测 , 既在移动中进行科学探测 , 也在停止的时候进行 。
其中移动有多种形式 , 一种是靠地面指定每一步的步长 。 同时也可以不靠地面指定 , 只告诉它一个40米之内的目标点 , 它就可以边走边看边规划 , 自主移动到目标点 。 发现路径不合适 , 就会主动选择合适的路径去到达目标点 。 类似我们日常用到的导航软件会给你提供多种路线 。
祝融号的智能性 , 可谓是当今地外天体巡视器的最高水平 , 虽然和地球地面的无人驾驶车辆相比还是有差距 。 这个差距来自两方面:第一 , 地球地面的情况和火星上的地形完全不一样 , 地球上自动驾驶可以利用公路的标志线等信息做辅助;第二 , 地面的计算机运算能力更强 , 可以达到更高的智能程度 。 祝融号受限于各种因素 , 但也达到了相当高的水平 。
这次火星探测 , 一次就实现了环绕、着陆和巡视三个目标 , 这样的成功并不是偶然 。 严肃认真的论证历程 , 嫦娥探月工程带来的技术支撑等 , 都是成功的基础 , 加上团队的不懈努力 , 以及航天积淀下来的技术、物资、实验 , 还有精神财富 , 这些因素共同促成了天问任务的圆满成功 。
天问解决了哪些“灵魂之问”
最后给大家介绍这一次任务过程中解决了哪些问题 , 面临了哪些挑战?一共有六个方面 。
第一个还是测控通信的问题 。 如前文所提 , 2007年火星探测没有成行的一个很重要的原因是四亿公里的通讯瓶颈 。 四亿公里虽然在宇宙尺度上是一个很近的距离 , 但实际却很远 。
推荐阅读







- 产品|泰晶科技与紫光展锐联合实验室揭牌
- 空间|(科技)科普:詹姆斯·韦布空间望远镜——探索宇宙历史的“深空巨镜”
- 相关|科思科技:无人机地面控制站相关设备产品开始逐步发力
- 机身重量|黑科技眼控对焦23年后回归,升级! 江一白解读EOS R3
- 公司|科思科技:正在加速推进智能无线电基带处理芯片的研发
- 项目|常德市二中2021青少年科技创新大赛再获佳绩
- 视点·观察|科技巨头纷纷发力元宇宙:这是否是所有人的未来?
- 技术|聚光科技旗下临床质谱仪获批医疗器械注册证
- 视点·观察|科技股连年上涨势头难以持续:或已透支未来涨幅
- 视点·观察|科技行业都在谈论“元宇宙”,可是它还不存在