物体|CoRL 2021奖项公布,MIT华人博士生获最佳论文,本科毕业于上交大、清华( 三 )
论文标题:XIRL: Cross-embodiment Inverse Reinforcement Learning
作者:Kevin Zakka, Andy Zeng, Pete Florence, Jonathan Tompson, Jeannette Bohg, Debidatta Dwibedi(斯坦福大学 , 谷歌机器人团队 , UC 伯克利)
论文链接:https://arxiv.org/pdf/2106.03911.pdf
最佳系统论文奖
CoRL 2021 最佳系统论文奖授予了哥伦比亚大学的研究《FlingBot: The Unreasonable Effectiveness of Dynamic Manipulation for Cloth Unfoldin_g_》 。
文章图片
作者:Huy Ha, Shuran Song
论文链接:https://openreview.net/pdf?id=0QJeE5hkyFZ
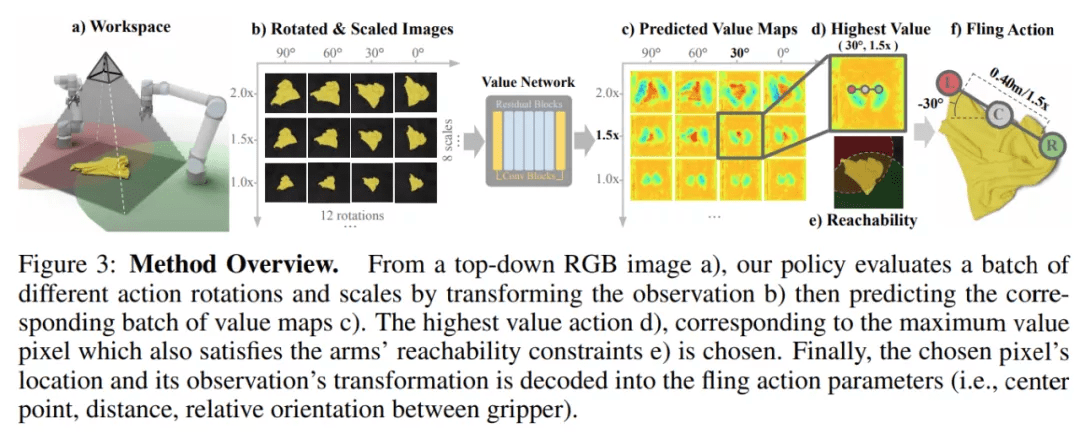
论文摘要:高速动态动作(例如投掷)通过提高运动效率并有效扩大物理触及范围 , 在人们与可变形物体的日常互动中发挥着至关重要的作用 。 先前大多数工作都使用专门的单臂准静态(quasi-static)动作来处理布料操作(例如铺床单、叠衣服) , 这需要大量交互来初始化布料的配置 , 并严格限制了机器人可操纵的最大布料尺寸 。 在这项工作中 , 研究者提出了一种自监督学习框架 FlingBot , 证明了动态甩动动作对布料展开的有效性 。 该方法从视觉观察结果中学习了如何使用拾取、拉伸和甩动几个原型动作 , 使得机器人能够通过控制双臂的设置从任意初始配置展开一块织物 。 最终系统在新型布料上的 3 个动作内实现了超过 80% 的覆盖率 , 可以展开比系统覆盖范围更大的布料 。 尽管该研究仅在矩形布料上训练了模型 , 但这种方法仍然可以泛化到 T 恤 , 继而用于展开叠取衣物 。 该研究还在真实世界的双臂机器人平台上对 FlingBot 进行了微调 , 使得它比准静态基线增加了 4 倍以上的布料覆盖率 。 FlingBot 展示出超越准静态基线的卓越性能 , 并表明了动态动作对可变形物体操作的有效性 。
该方法的主要流程和原理如下图所示:
文章图片
作者介绍
该论文的作者 Huy Ha 是哥伦比亚大学计算机科学系博士生 , 导师 Shuran Song 是哥伦比亚大学计算机科学系助理教授 。
文章图片
图左:Huy Ha , 图右:Shuran Song 。
Shuran Song 的研究重点是计算机视觉和机器人技术 , 曾获 RSS 2019 最佳系统论文奖、2020 年亚马逊研究奖、2020 年 IEEE Transactions on Robotics 最佳论文奖等 。
最佳系统论文奖入围名单
此外 , 还有两篇论文入围了 CoRL 2021 的最佳系统论文奖:
SORNet: Spatial Object-Centric Representations for Sequential Manipulation
【物体|CoRL 2021奖项公布,MIT华人博士生获最佳论文,本科毕业于上交大、清华】
推荐阅读







- Google|谷歌暂缓2021年12月更新推送 调查Pixel 6遇到的掉线断连问题
- 精度|将建模速率提升10倍,消费级3D扫描仪Magic Swift在2021高交会大显“身手”
- 四平|智慧城市“奥斯卡”揭晓!祝贺柯桥客户荣获2021世界智慧城市治理大奖
- 系列|2021中国航天发射圆满收官!年发射55次居世界第一
- 项目|常德市二中2021青少年科技创新大赛再获佳绩
- 选型|数据架构选型必读:2021上半年数据库产品技术解析
- 殊荣|蝉联殊荣!数梦工场荣获DAMA2021数据治理三项大奖
- 公司|外媒:2021,人类太空事业的重大年份
- 语境|B站2021个人年度报告发布:你共计看了多少个视频
- 最新消息|IT系统出错 英国银行给7.5万人多发11亿工资