【团队|机械手能抓豆腐?这团队提出的触觉传感器阵列或惠及皮肤监测】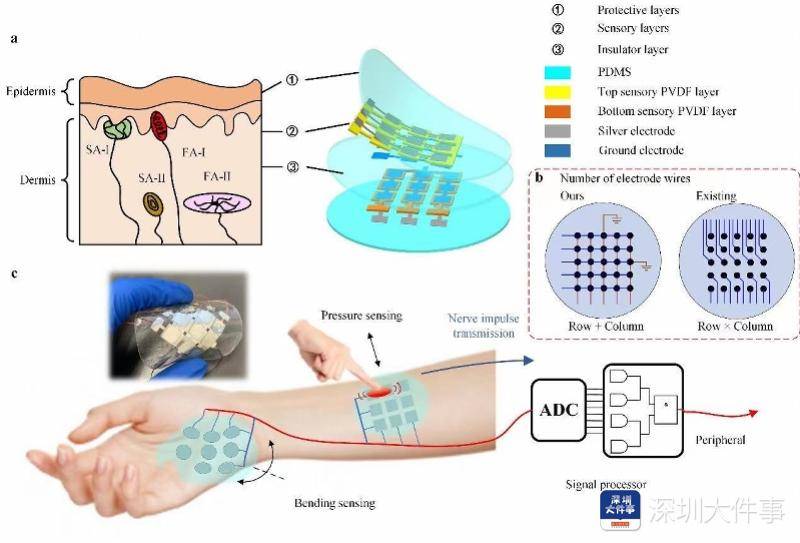
文章图片
南都讯 采访人员朱倩 通讯员 谢梁晖 机械手可以平稳抓起柔软易碎的豆腐 , 重量只有5mg的小蜘蛛 , 其运动也能被传感器准确捕捉 , 近日 , 哈尔滨工业大学(深圳)(以下简称“哈工大(深圳)”)胡泓教授团队联合香港城市大学杨征保教授团队提出了一种基于压电薄膜、具有行+列电极结构的触觉传感器阵列 , 相关成果发表在 《Advanced Science》 。 这项研究为触觉传感器设计提供了一种新的策略 , 有望惠及电子皮肤、健康监测、动物运动检测和机器人等领域 。
“该项研究主要具有三大创新点 。 ”胡泓介绍说 , 多功能触觉传感器阵列在测量压力、弯曲半径和弯曲方向的同时 , 还可以实时区分外部刺激的模式 , 实现了多种测量模式的自动解耦 。 同时 , 传感器阵列采用横纵电极结构 , 将电极引线数量由n×m降低至n+m , 极大降低了制作成本和难度 。 此外 , 该项研究还解决了横纵电极结构在压电传感器阵列中的信号串扰问题 。
目前 , 柔性触觉传感器阵列在应用上面临着许多挑战 。 现有的触觉传感器阵列往往只具有单一功能 , 同时大面积、高分辨率的传感器阵列需要大量的电极引线 。 两支团队本次提出的触觉传感器阵列 , 可以实时感测和区分各种外部刺激的大小、位置和模式 , 包括轻微触碰、按压和弯曲等 。
与此同时 , 其独特的设计克服了其他压电传感器中存在的串扰问题 。 压力测试和弯曲测试表明 , 本次提出的触觉传感器阵列具有高灵敏度(7.7 mV / kPa) , 长期耐用性(80,000个循环周期)和快速响应时间(10 ms)的特征 。 触觉传感器阵列还显示出卓越的可扩展性和易于大规模制造的能力 。
近年来 , 柔性电子皮肤一直是学术界和业界的热门话题 , 其中用于模仿人体皮肤功能的仿生触觉传感器是研究的重点之一 。 触觉传感器能对外界的应力刺激产生对应的电信号 , 广泛应用在人工智能、人机交互、生物信息检测等领域 。 深入了解人体皮肤的感知原理 , 是设计仿生触觉传感器的重要前提 。
据了解 , 人体皮肤是一种非常“强大”的触觉传感器 , 它可以同时检测各种刺激的强度和模式 , 可以分辨出按压、敲击和弯曲 , 这主要归因于四个机械感受器(SA-I , II和FA-I , II)分布在人体皮肤的不同区域 , 机械感受器接收外部刺激并将其转换为电子信号 , 这四种受体的综合信号由大脑进行分析 , 进而得到物体大小、形状和质地等信息 。
推荐阅读







- 核心|中科大陈秀雄团队成功证明凯勒几何两大核心猜想,研究登上《美国数学会杂志》
- VIA|x86研发团队卖给Intel后 VIA出售厂房和设备:北美分部就此终结
- 团队|深信院41项科研项目亮相高交会 11个项目获优秀产品奖
- 团队|玉米和水稻基因组引导编辑效率提高3倍
- 敏捷|上海人工智能“十四五”规划发布:集聚超20个国际顶尖团队
- 团队|生物技术成茶产业提质“金钥匙”
- 团队|俞敏洪首场助农直播带货,寻找新商业模式和老师转型方式
- 团队|年终策划 | 航天专家史青:为火箭“体检”给火星车装“耳朵”
- IT|大疆车载业务团队快速扩张 成员已近千人
- 团队|第二届北京移动5G应用创新大赛“科技含量”上升